Rockwell Automation 20D PowerFlex 700S with Phase I Control Reference Manual User Manual
Page 144
144
Rockwell Automation Publication PFLEX-RM002D-EN-E - August 2013
Chapter 1
Detail Drive Configuration and Operation
Hi-Resolution Encoder Feedback Option
The position feedback (seen in [FB Opt0 Posit]) from a Hi-Resolution Encoder
counts at a rate of 1,048,576 counts per motor revolution.
Parameter 259 [Hi Res0 Config] is used to configure the Hi-Resolution Encoder.
•
Bit 5 “Hi Res Dir” determines counting direction. If clear, direction is
forward or up. If set, the direction is reverse or down.
•
Bits12 “SmplRate baits “SmplRate bt3” configure the sample interval for
measuring speed (see
Table 10
). Increasing the encoder sample interval
improves speed measurement near zero speed. Decreasing allows the speed
control regulator to perform with high gains at high speeds.
•
The remaining bits are reserved (not used).
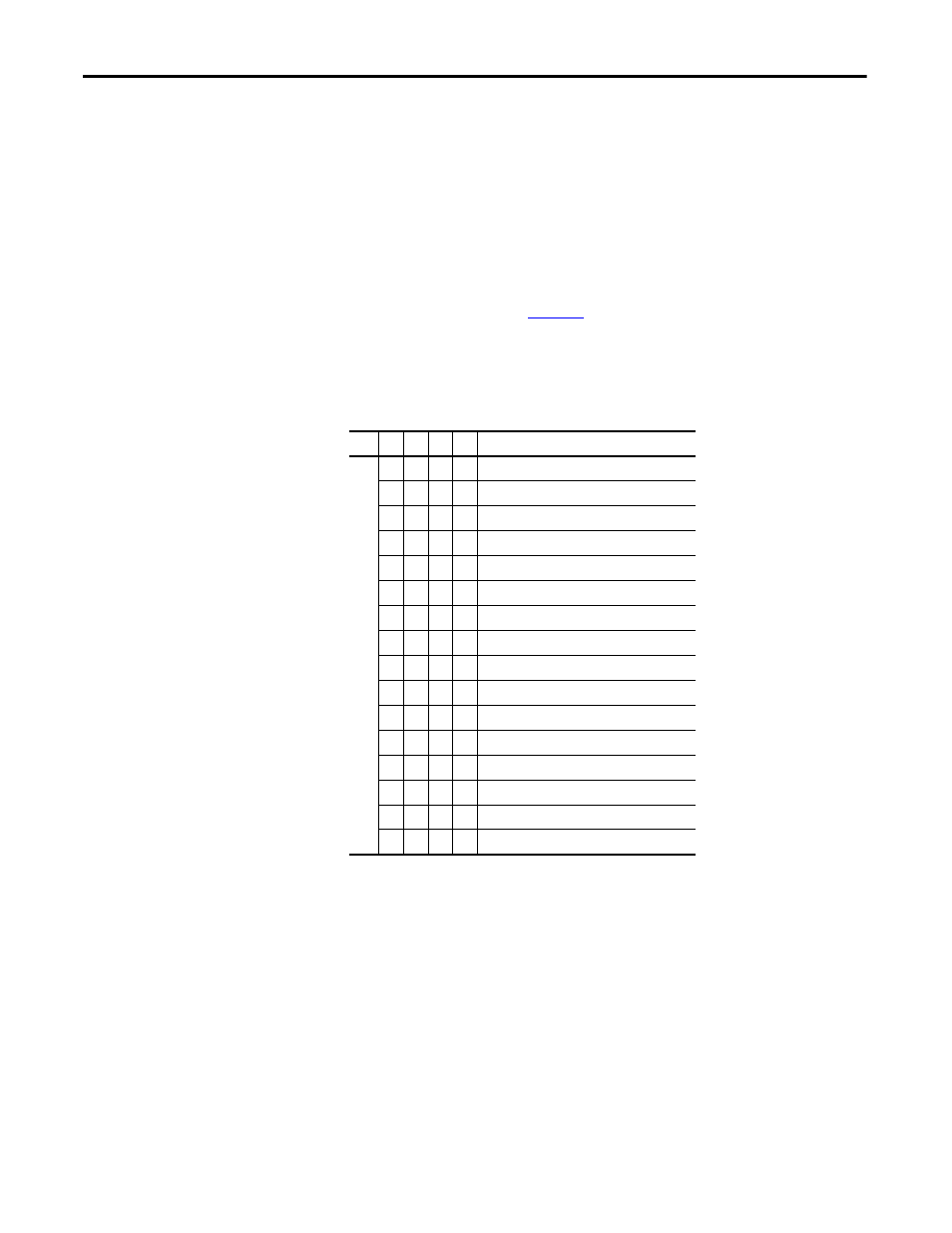
Table 10 - Encoder Sample Interval
Parameter 260 [Hi Res0 Status] indicates faults on the Hi-Resolution Encoder
Feedback Option.
•
Bit 8 “Open Wire” indicates an open wire fault.
•
Bit 9 “Power Fail” indicates the failure of the power supply.
•
Bit 10 “Diag Fail” indicates the option board failed its power-up diagnostic
test.
•
Bit 11 “Msg Checksum” indicates a message checksum fault.
•
Bit 12 “Time Out Err” indicates a RS-485 time-out fault.
•
The remaining bits are reserved (not used).
Bit
15
14
13
12
Encoder Sample Interval Settings
0
0
0
0
0.5 ms
0
0
0
1
0.5 ms (min. setting)
0
0
1
0
1.0 ms
0
0
1
1
1.5 ms
0
1
0
0
2.0 ms (default setting)
0
1
0
1
2.5 ms
0
1
1
0
3.0 ms
0
1
1
1
3.5 ms
1
0
0
0
4.0 ms
1
0
0
1
4.5 ms
1
0
1
0
5.0 ms
1
0
1
1
5.5 ms
1
1
0
0
6.0 ms (max. setting)
1
1
0
1
6.0 ms
1
1
1
0
6.0 ms
1
1
1
1
6.0 ms