Exercise #2 – controlling speed in host mode – Rockwell Automation 2098-DSD-xxx Ultra3000 Host Commands for Serial Interface User Manual
Page 169
Publication 2098-RM003A-EN-P October 2001
Using Host Commands
C-5
Exercise #2 – Controlling
Speed in Host Mode
This exercise issues a host command to set the speed of the motor. It
builds on the Ultra family command previously issued to place the
drive in velocity set point control mode. The command string
parameters to set the motor speed to 500 rpm are:
Note: The numbers are hexadecimal.
1. Convert 500 rpm to an 8 character, hexadecimal value. Assume a
standard encoder with 2000 lines per revolution (8000 counts/rev)
to calculate the hexadecimal data value:
2. Calculate the checksum and convert to hexadecimal by subtracting
760 from 256 (256 - 760 = -504), and converting -504 to hex
(0xFFFFFE08).
3. Prefix the string with a colon and append the two least significant
digits of the hex value (08) to the end of the command string.
4. Type the command string into Hyperterminal followed by the
Enter key. The motor will rotate at 500 rpm when the drive is
enabled.
5. Stop the motor using the same command by setting the speed to
zero (0) rpm.
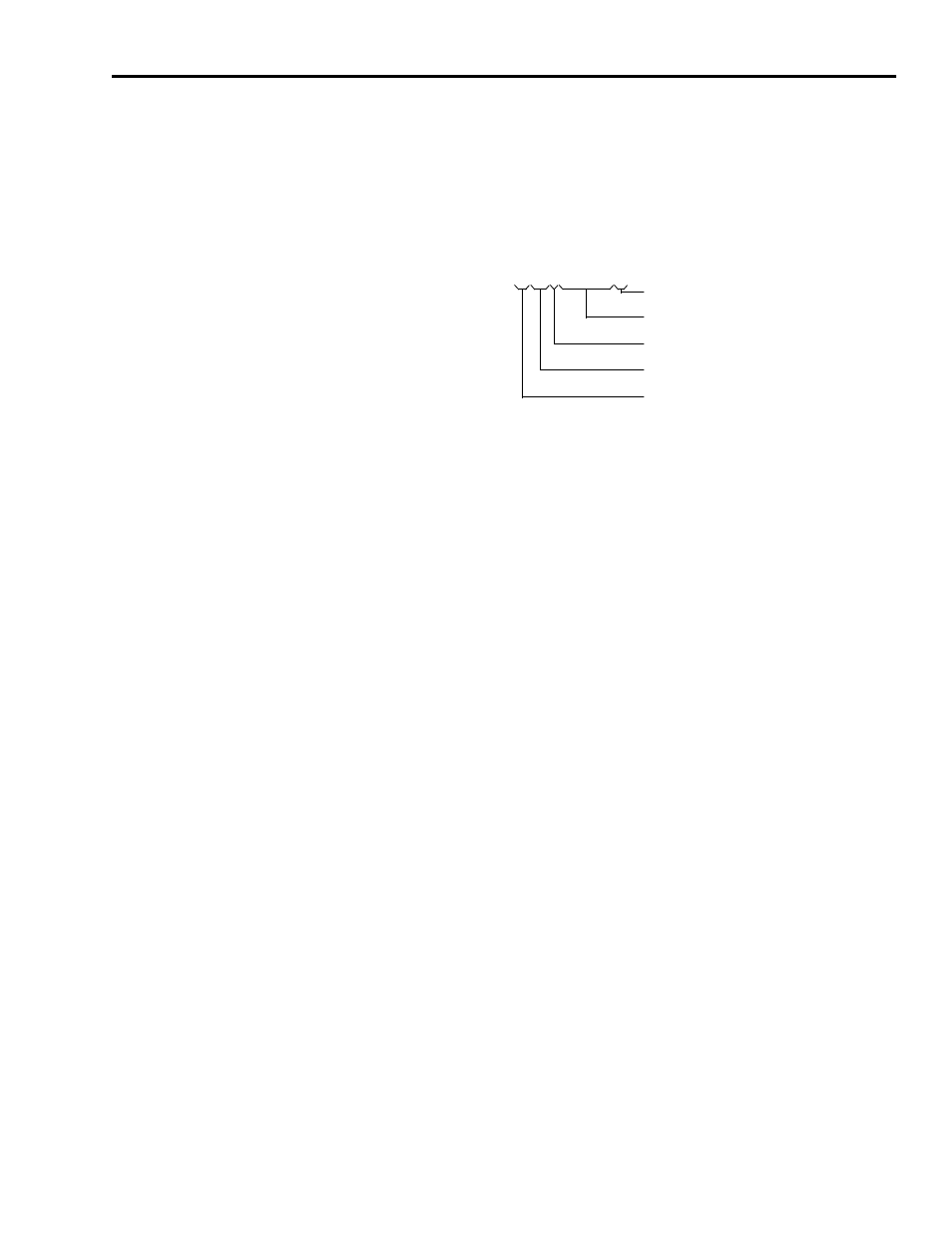
Command String
:0006D100012EBCcc
Parameters
cc
Checksum
00012EBC
Data
1
Function
06D
Parameter
00
Drive Address
Encoder Conversion
1 rpm
=
8000 counts/minute
or
155 counts/second
Hex Conversion
500 rpm
=
77,500 counts/second
or
0x12EBC hex
Hex Character
0
0
0
6
D
1
0
0
0
1
2
E
B
C
c
c
ASCII Value
48
48
48
54
68
49
48
48
48
49
50
69
66
67
ASCII Sum
—
96
144 198 218 267 315 363 411 508 558 627 693 760
Hex Conversion
256 -
760 =
0xFFFFFE08 Hex
Command String
:0006D100012EBC08