Encoder commands, Position feedback source, Encoder ratio – motor – Rockwell Automation 2098-DSD-xxx Ultra3000 Host Commands for Serial Interface User Manual
Page 107: Encoder commands -91, Position feedback source encoder ratio – motor
Publication 2098-RM003A-EN-P October 2001
Command Reference
2-91
Encoder Commands
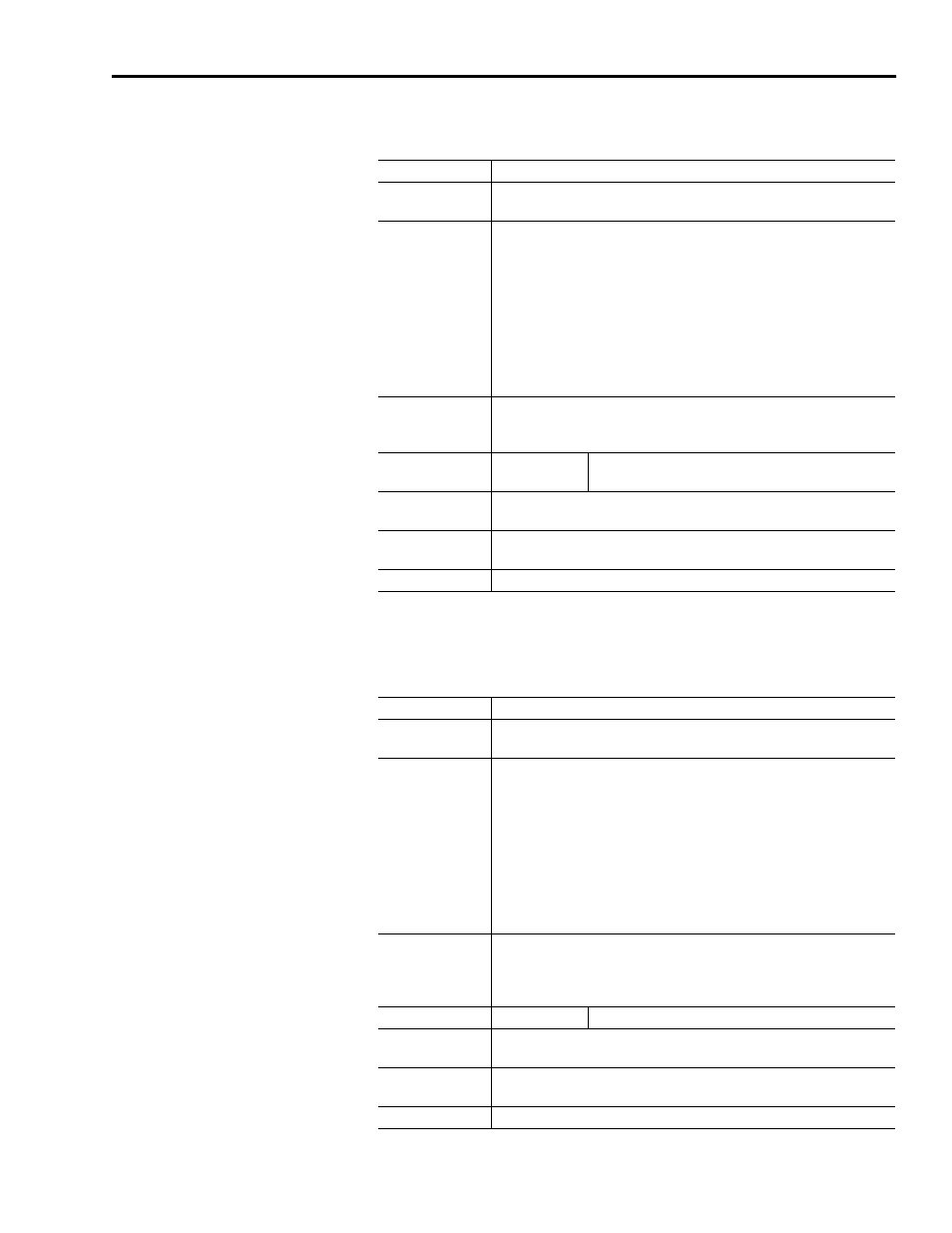
Position Feedback Source
Encoder Ratio – Motor
Format:
:aa02Cfddcc
Parameter
Code:
0x02C
Valid Function
Codes:
0x0 = Read Working Value
0x1 = Write Working Value
0x2 = Read Non-Volatile Value
0x3 = Write Non-Volatile and Working Values
0x4 = Copy Non-Volatile Value to Working Value
0x5 = Copy Working Value to Non-Volatile Value
0x6 = Read Default Value
0x7 = Copy Default Value to Non-Volatile and Working Values
0x8 = Read Minimum Value
0x9 = Read Maximum Value
Valid Exception
Codes:
0x03 = EEPROM Write Error
0x05 = Data Above Maximum
0x08 = Invalid Function Code
Data Fields:
dd
0 = Dual-loop disabled
1 = Dual-loop enabled
Minimum
Value:
0x00
Maximum
Value:
0x01
Default:
0
Format:
:aa101fddddcc
Parameter
Code:
0x101
Valid Function
Codes:
0x0 = Read Working Value
0x1 = Write Working Value
0x2 = Read Non-Volatile Value
0x3 = Write Non-Volatile and Working Values
0x4 = Copy Non-Volatile Value to Working Value
0x5 = Copy Working Value to Non-Volatile Value
0x6 = Read Default Value
0x7 = Copy Default Value to Non-Volatile and Working Values
0x8 = Read Minimum Value
0x9 = Read Maximum Value
Valid Exception
Codes:
0x03 = EEPROM Write Error
0x04 = Data Below Minimum
0x05 = Data Above Maximum
0x08 = Invalid Function Code
Data Fields:
dddd
Units: Motor Encoder Counts
Minimum
Value:
0x8001
Maximum
Value:
0x7FFF
Default:
1