Rockwell Automation 2098-DSD-xxx Ultra3000 Digital Servo Drives with DeviceNet User Manual
Page 99
Publication 2098-RM004A-EN-P – August 2002
Programming Reference
2-83
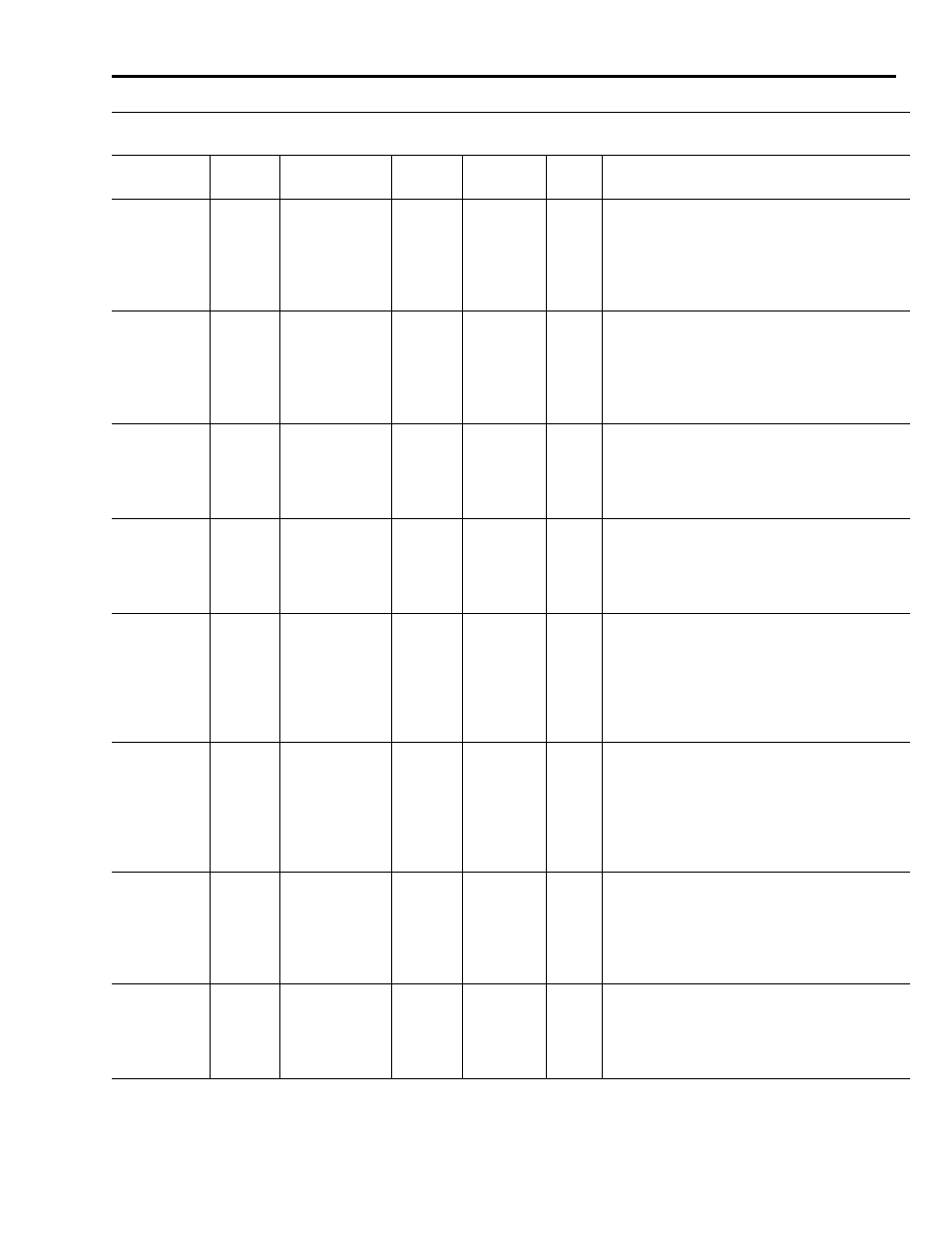
215
Set
Maximum Rotary
Speed
UINT
2
RPM
The maximum speed of a rotary motor
(Active if Parameter Instance 195 = 0).
Range: 300 to 32767
Default: 3500
Note: Set is not allowed if the drive is enabled.
216
Set
Maximum Linear
Speed
UINT
2
m/s /
256
The maximum speed of a linear motor
(Active if Parameter Instance 195 = 1).
Range: 32 to 32767
Default: 256
Note: Set is not allowed if the drive is enabled.
217
Set
Motor Peak
Current
UINT
2
Amps /
128
The peak (intermittent) current rating of the motor.
Range: 1 to 32767
Default: 2560
Note: Set is not allowed if the drive is enabled.
218
Set
Motor
Continuous
Current
UINT
2
Amps /
128
The continuous current rating of the motor.
Range: 1 to 32767
Default: 640
Note: Set is not allowed if the drive is enabled.
219
Set
Motor Encoder
Type
USINT
1
Type of motor encoder.
0 - None (not supported)
1 - Incremental (default)
2 - Sine/Cosine
3 - SRS/SRM
Note: Set is not allowed if the drive is enabled.
220
Set
Commutation
Type
USINT
1
The type of motor commutation. The drive only
supports sinusoidal commutation.
0 - Brush
1 - Trapezoidal
2 - Sinusoidal (default)
Note: Set is not allowed if the drive is enabled.
221
Set
Motor Startup
Type
USINT
1
Type of motor startup for sinusoidal commutation.
0 - Self-Sensing
1 - Hall Inputs (default)
2 - Serial
Note: Set is not allowed if the drive is enabled.
222
Set
Hall Offset
UINT
2
Degs
Hall offset, in units of electrical degrees.
Range: 0 to 359
Default: 0
Note: Set is not allowed if the drive is enabled.
Parameter Object,
Instances ID = 1- 1059
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data Size
(Bytes)
Units /
Scale
Description