Rockwell Automation 2098-DSD-xxx Ultra3000 Digital Servo Drives with DeviceNet User Manual
Page 29
Publication 2098-RM004A-EN-P – August 2002
Programming Reference
2-13
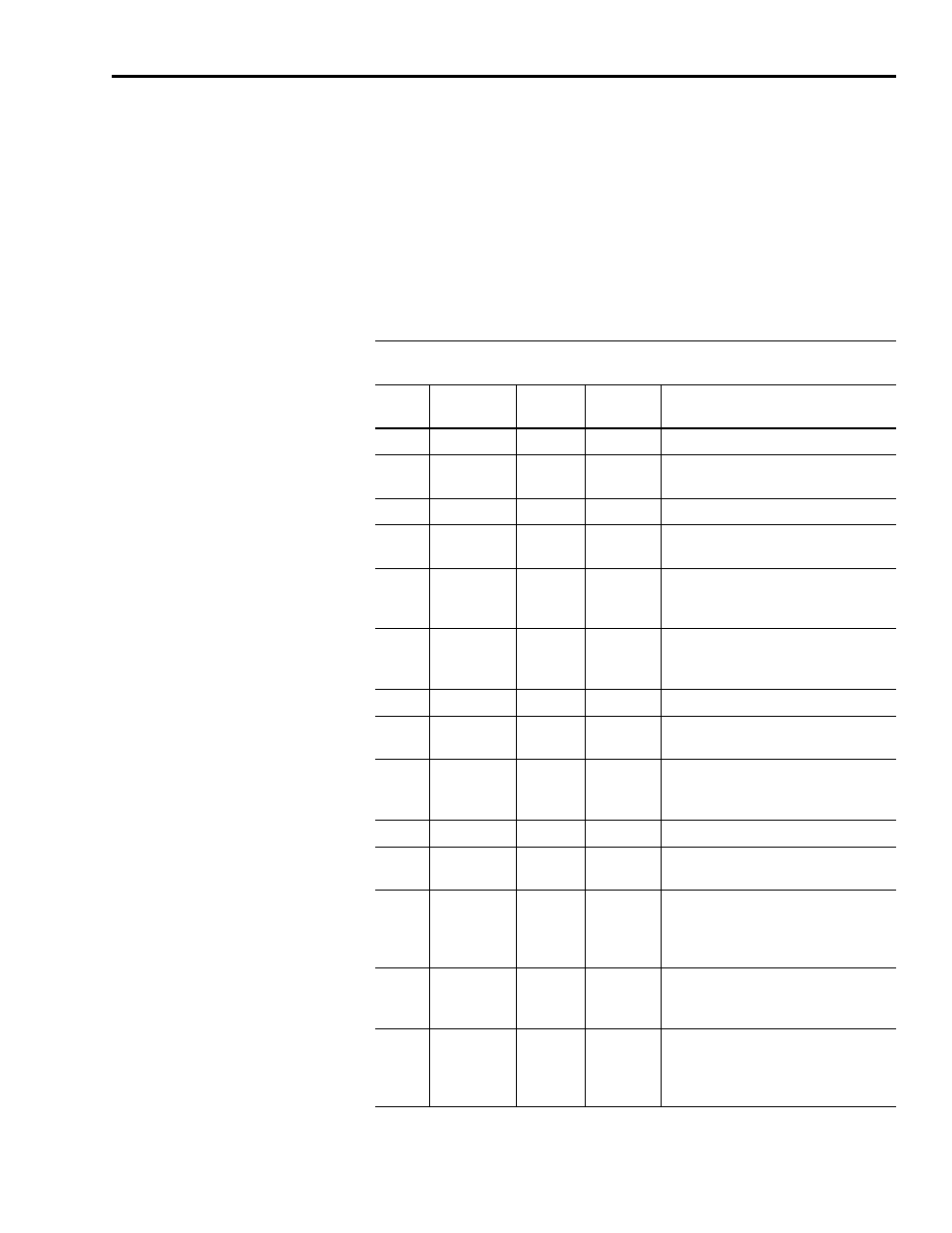
The following Assembly Objects are implemented in the drive and
buffer I/O in the following fashion:
• RO = Read Only
• R/W = Read/Write
• R/PW = Read/Write Protected.
Refer to the sections Output Assemblies on page 2-14 and Input
Assemblies on page 2-33 for detailed information about the various
instances of the Assembly Objects.
Assembly Object,
Instance ID = 1 - 18
ID
Data Type
Access
Size
(Bytes)
Description
1
Static Output R/W
1
Handshake Bit, Feedback Data Pointer
2
Static Output R/W
7
Handshake Bit, Feedback Data Pointer,
and Parameter Data Value
3
Static Output R/PW
2
4
Static Output R/PW
3
16 Bit Logic Command, Handshake Bit,
and Feedback Data Pointer
5
Static Output R/PW
8
16 Bit Logic Command, Handshake Bit,
Feedback Data Pointer, and Command
Data Value
6
Static Output R/PW
9
16 Bit Logic Command, Handshake Bit,
Feedback Data Pointer, and Parameter
Data Value
7
Static Output R/PW
4
8
Static Output R/PW
5
32 Bit Logic Command, Handshake Bit,
and Feedback Data Pointer
9
Static Output R/PW
11
32 Bit Logic Command, Startup
Commutation Done Bit, Feedback Data
Pointer, and Parameter Data Value
10
Static Input
RO
4
11
Static Input
RO
8
32 Bit Logic Status, and Feedback Data
Value
12
Static Input
RO
9
13
Static Input
RO
5
32 Bit Logic Status, Extra Status Byte
(with Write Data Status Bits, and
Handshake Echo Bit)
14
Static Input
RO
8