Master gear count 3, Motor gear count 3, Master gear count 4 – Rockwell Automation 2098-DSD-xxx Ultra3000 Digital Servo Drives with DeviceNet User Manual
Page 103: Motor gear count 4, Master gear count 5, Motor gear count 5, Master gear count 6, Motor gear count 6, Master gear count 7
Publication 2098-RM004A-EN-P – August 2002
Programming Reference
2-87
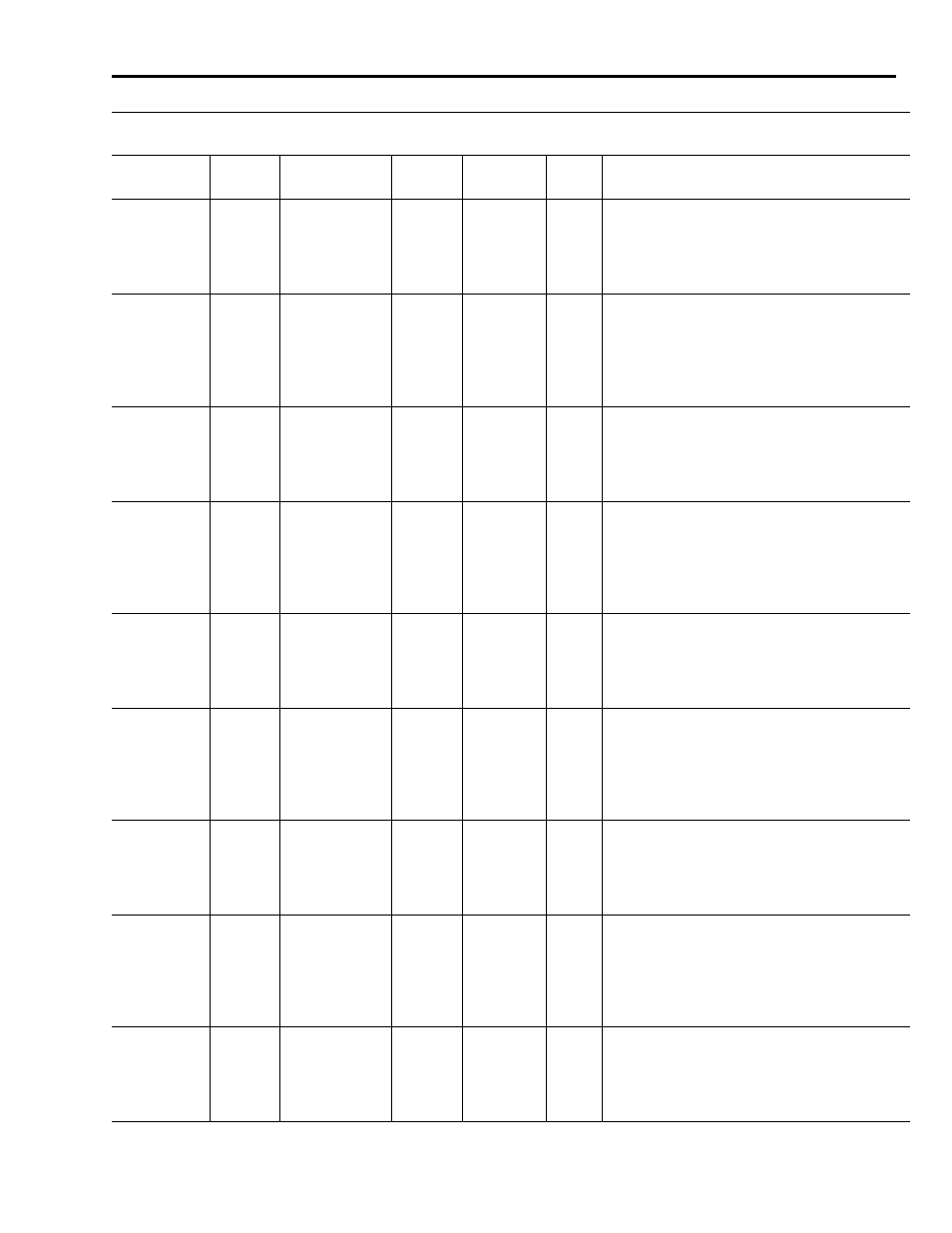
270
Set
Master Gear
Count 3
UINT
2
Cnts
Master encoder counts for preset gear ratio 3. The
preset gear ratio is defined by the ratio of the
Master Gear Count and the Motor Gear Count.
Range: 1 to 32767
Default: 1
271
Set
Motor Gear
Count 3
INT
2
Cnts
Motor encoder counts for preset gear ratio 3. The
preset gear ratio is defined by the ratio of the
Master Gear Count and the Motor Gear Count. This
value should be nonzero.
Range: -32767 to 32767
Default: 1
272
Set
Master Gear
Count 4
UINT
2
Cnts
Master encoder counts for preset gear ratio 4. The
preset gear ratio is defined by the ratio of the
Master Gear Count and the Motor Gear Count.
Range: 1 to 32767
Default: 1
273
Set
Motor Gear
Count 4
INT
2
Cnts
Motor encoder counts for preset gear ratio 4. The
preset gear ratio is defined by the ratio of the
Master Gear Count and the Motor Gear Count. This
value should be nonzero.
Range: -32767 to 32767
Default: 1
274
Set
Master Gear
Count 5
UINT
2
Cnts
Master encoder counts for preset gear ratio 5. The
preset gear ratio is defined by the ratio of the
Master Gear Count and the Motor Gear Count.
Range: 1 to 32767
Default: 1
275
Set
Motor Gear
Count 5
INT
2
Cnts
Motor encoder counts for preset gear ratio 5. The
preset gear ratio is defined by the ratio of the
Master Gear Count and the Motor Gear Count. This
value should be nonzero.
Range: -32767 to 32767
Default: 1
276
Set
Master Gear
Count 6
UINT
2
Cnts
Master encoder counts for preset gear ratio 6. The
preset gear ratio is defined by the ratio of the
Master Gear Count and the Motor Gear Count.
Range: 1 to 32767
Default: 1
277
Set
Motor Gear
Count 6
INT
2
Cnts
Motor encoder counts for preset gear ratio 6. The
preset gear ratio is defined by the ratio of the
Master Gear Count and the Motor Gear Count. This
value should be nonzero.
Range: -32767 to 32767
Default: 1
278
Set
Master Gear
Count 7
UINT
2
Cnts
Master encoder counts for preset gear ratio 7. The
preset gear ratio is defined by the ratio of the
Master Gear Count and the Motor Gear Count.
Range: 1 to 32767
Default: 1
Parameter Object,
Instances ID = 1- 1059
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data Size
(Bytes)
Units /
Scale
Description