R 344, Home position, Home sensor backoff – Rockwell Automation 2098-DSD-xxx Ultra3000 Digital Servo Drives with DeviceNet User Manual
Page 109: Homing velocity, Homing accel/ decel, Home offset move, Homing stop decel, Home sensor polarity, Homing creep velocity
Publication 2098-RM004A-EN-P – August 2002
Programming Reference
2-93
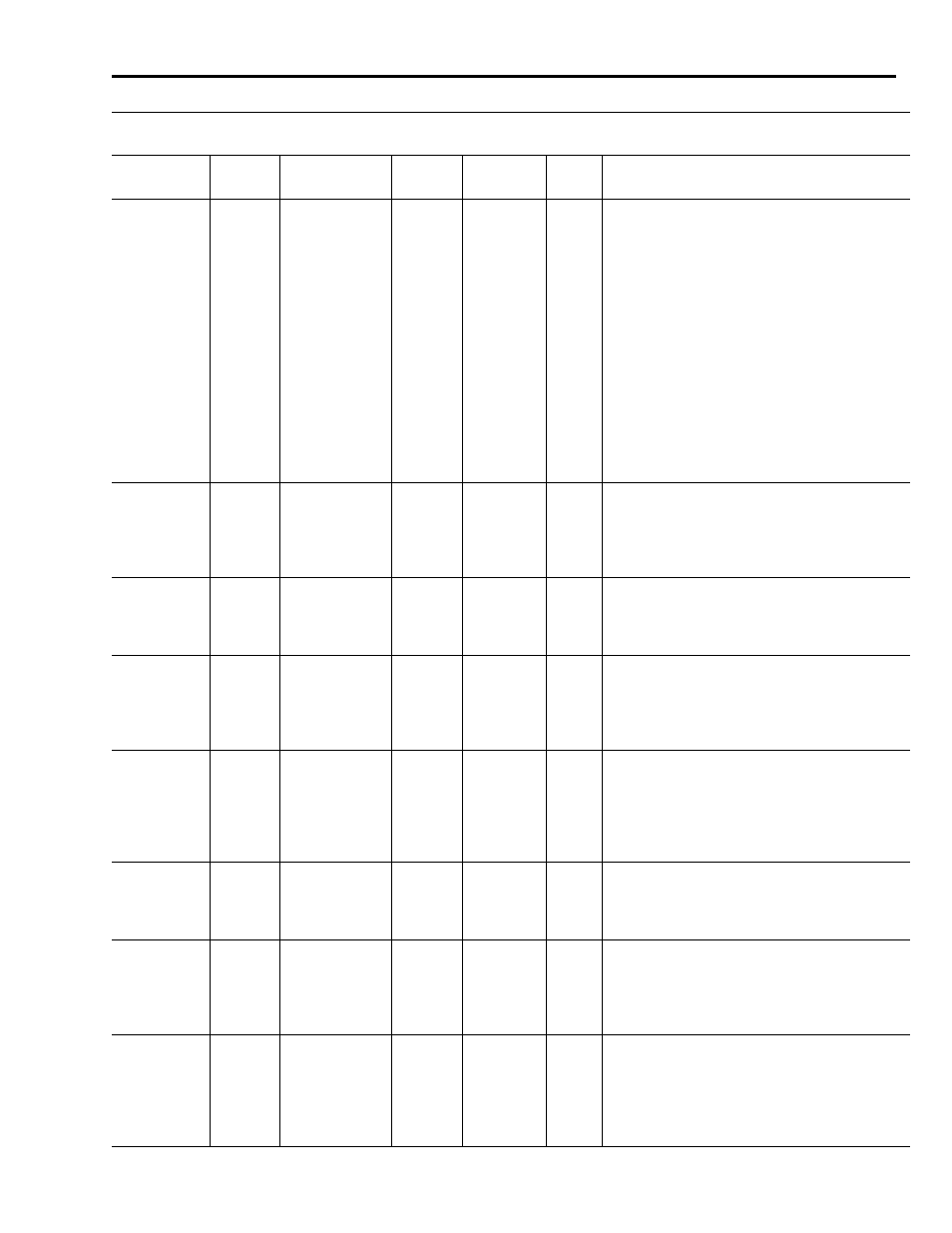
338
Set
Home Sensor
Backoff
USINT
1
Causes the drive to move in the direction opposite
the direction specified by the Homing Velocity
setting, when the homing procedure is started with
the Sensor input active. Motion will continue in the
reverse direction (moving at the Homing Accel,
Homing Decel, and Homing Velocity settings), until
the Sensor input is detected inactive, at which point
the normal homing procedure will take over.
Controls whether the drive backs off the sensor if
the sensor is active at the start of the homing
operation.
Note: This parameter does not apply if 'Home to
Marker' is selected as the Homing Type.
0 - Disable (default)
1 - Enable
339
Set
Homing Velocity
DINT
4
Cnts /
Sec
The commanded velocity used during homing. The
sign of the parameter value specifies the direction of
motion during homing.
Range: -0x7fffffff to 0x7fffffff
Default: 100000
340
Set
Homing Accel/
Decel
UDINT
4
Cnts /
Sec
2
The acceleration and deceleration rate used during
homing.
Range: 0 to 0x7fffffff
Default: 100000
341
Set
Home Offset
Move
DINT
4
Cnts
The distance the motor position will be from the
home position after the homing procedure is
complete.
Range: -0x7fffffff to 0x7fffffff
Default: 0
342
Set
Homing Stop
Decel
UDINT
4
Cnts /
Sec
2
The deceleration rate used to bring the motor to a
stop when a homing procedure is terminated with
the Stop Homing input or the Stop Homing
command.
Range: 0 to 0x7fffffff
Default: 100000
343
Set
Home Sensor
Polarity
USINT
1
Specifies the digital input state that the drive uses
to determine if the Home Sensor input is active.
0 - Inactive to active transition (default)
1 - Active to inactive transition
344
Set
Home Position
DINT
4
Cnts
This value is used as the home position when the
Define Home input is activated, or at the completion
of a homing procedure.
Range: -0x7fffffff to 0x7fffffff
Default: 0
345
Set
Homing Creep
Velocity
UDINT
4
Cnts /
Sec
For the Homing Type selection 3 - Home to Sensor,
Backward to Marker - this velocity is used to travel
back to the marker after the drive finds the sensor
edge.
Range: 0 to 0x7fffffff
Default: 10000
Parameter Object,
Instances ID = 1- 1059
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data Size
(Bytes)
Units /
Scale
Description