Index 0 accel, Index 0 decel, Index 0 pointer – Rockwell Automation 2098-DSD-xxx Ultra3000 Digital Servo Drives with DeviceNet User Manual
Page 112: Index 0 terminate, Index 0 absolute direction
Publication 2098-RM004A-EN-P – August 2002
2-96
Programming Reference
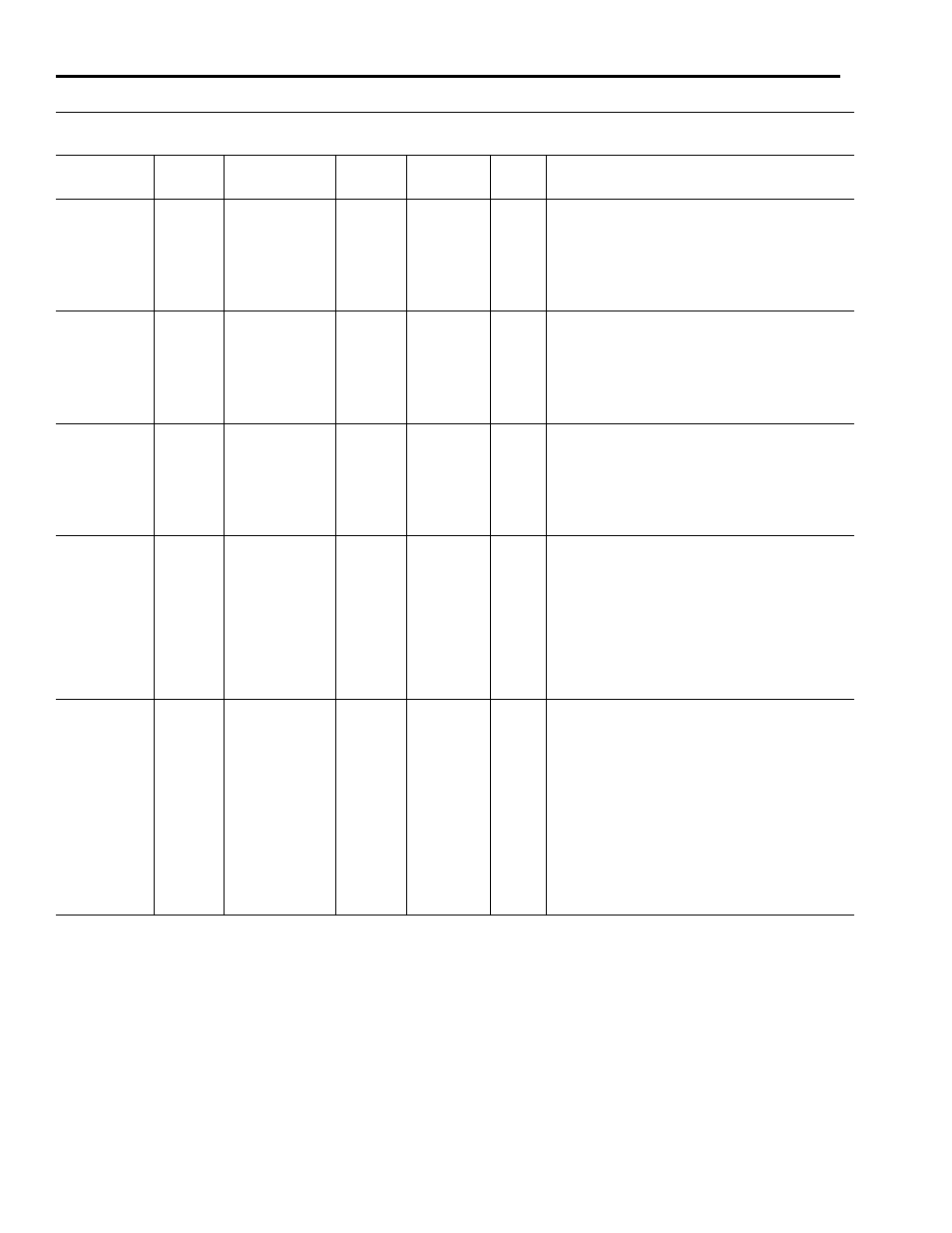
363
and
373, 383, …,
973, 983,
993
Set
Index 0 Accel
and
Index n Accel
where n = 1-63
UDINT
4
Cnts /
Sec
2
The acceleration rate used to change to higher
velocity during the index move.
Range: 0 to 0x7fffffff
Default: 100000
364
and
374, 384, …,
974, 984,
994
Set
Index 0 Decel
and
Index n Decel
where n = 1-63
UDINT
4
Cnts /
Sec
2
The deceleration rate used to change to a lower
velocity during the index move.
Range: 0 to 0x7fffffff
Default: 100000
365
and
375, 385, …,
975, 976,
995
Set
Index 0 Pointer
and
Index n Pointer
where n = 1-63
USINT
1
Specifies the next index move to execute if the Index
0 Terminate parameter is not set to 'Stop'.
Range: 0 to 63
Default: 0
366
and
376, 386, …,
976, 986,
996
Set
Index 0 Terminate
and
Index n Terminate
where n = 1-63
USINT
1
The drive's action when the index move has
completed.
0 - Stop
1 - Start Next Index immediately
2 - Wait for Start - 'Start Index' active transition
required to start next index.
3 - Index Without Stop - execute the next index
without stopping. The dwell time is ignored and a
'Start Index' is not required.
997
through
1059
Set
Index 0 Absolute
Direction
and
Index n Absolute
Direction
where n = 1-63
USINT
1
For absolute index moves, the direction of the travel
when:
• Parameter 35 - Position Rollover = 1 - Enable, or
• Single-turn Absolute mode is active (refer to
Parameter 231 - Single-Turn Absolute).
0 - Bi-directional (default) - moves to the desired
position using the shortest path.
1 - Forward Uni-directional - moves to the desired
position going forward.
2 - Reverse Uni-directional - moves to the desired
position going reverse.
Parameter Object,
Instances ID = 1- 1059
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data Size
(Bytes)
Units /
Scale
Description