Parameter data value and command data value fields – Rockwell Automation 2098-DSD-xxx Ultra3000 Digital Servo Drives with DeviceNet User Manual
Page 40
Publication 2098-RM004A-EN-P – August 2002
2-24
Programming Reference
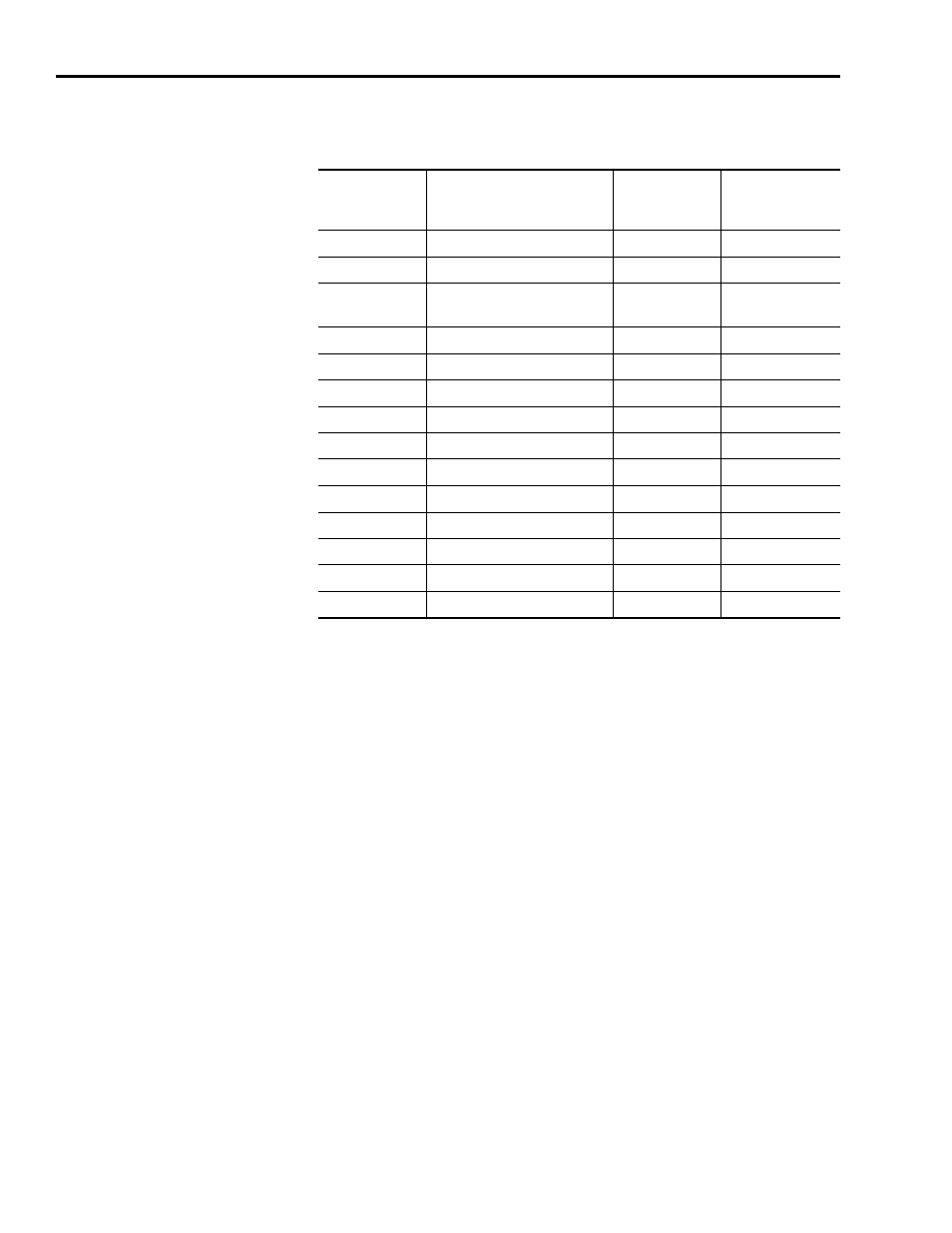
Refer to the Parameter Object instances to obtain scaling and units
information.
Parameter Data Value and Command Data Value Fields
The Parameter and Command Data Value fields contained in some of
the Output Assemblies allow you to write a parameter value to the
drive via I/O messaging. You can use Assemblies 2, 6, and 9 to write a
Data Value to the parameter object specified by Parameter Instance -
Low Byte and Parameter Instance - High Byte. See Parameter Object,
Instances ID = 1- 1059 on page 47. Assembly 5 also allows you to
write a Data Value to a parameter. However, Assembly 5 uses a
Command Data Pointer to select one of the parameters listed in the
Command Data table. Assembly 5 was implemented because it can be
sent in a non-fragmented I/O message. If Assembly 6 is sent via an
I/O message, the message is fragmented.
The Write Data bit is used to latch the Data Value that is located in the
last four bytes of the Output Assembly. A new data value will be
accepted by the drive on a zero to one transition (0 -> 1) of the Write
Data bit only if the Write Data Busy/Ack bit (located in the Input
Assembly) is low: 0 = idle, 1 = busy. The Write Data Busy/Ack bit is
cleared when the Write Data bit is set to zero and the drive is not busy
saving the data value. The Write Data and Write Data Busy/Ack bits
are ignored if the command assembly is updated via an explicit
message. By default, the value is only written to the drive as a
Feedback
Data Pointer
Name
Parameter
Object
Instance
Data Type
0
DINT
1
DINT
2
DINT
(not filtered)
3
INT
4
DWORD
5
Extended Fault Status
124
WORD
6
DWORD
7
DWORD
8
INT
9
DINT
10
DINT
11
DINT
12
UINT
13
DINT