Derivative (d) gain, Derivative (d) gain 26, Integrator limit – MTS Series 793 User Manual
Page 26
MTS Series 793 Tuning and Calibration
About Tuning
Introduction
26
Integral gain increases system response during static or low-frequency operation
and maintains the mean level at high-frequency operation. It can offset a DC or
steady-state error, such as that caused by valve imbalance.
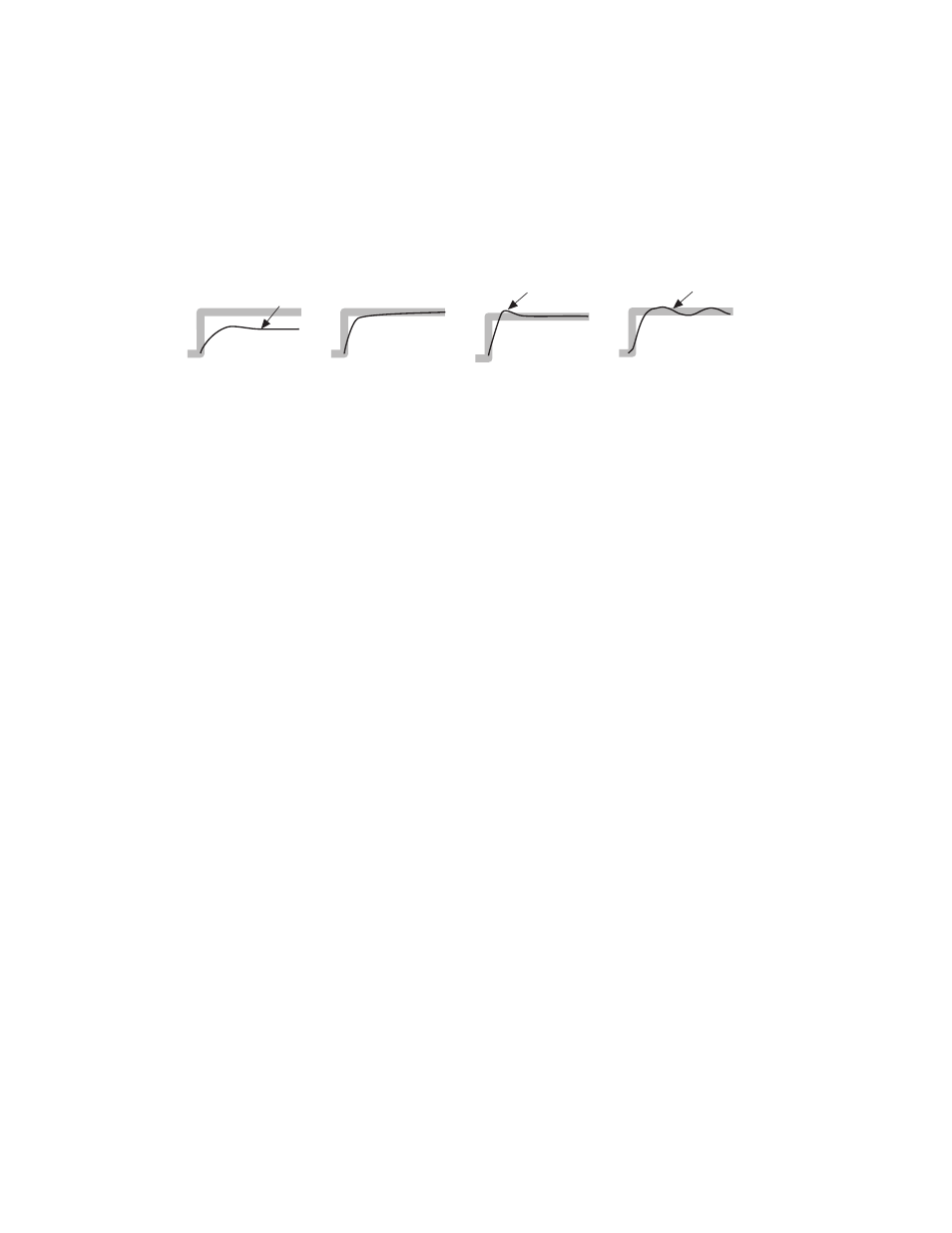
A ramp and hold waveform illustrate different levels of reset. The
I Gain adjustment determines how much time it takes to improve the mean level
accuracy.
Integral gain:
•
Improves mean level response during dynamic operation
•
Corrects feedback droop caused by the spring characteristic of the
servovalve in static and very low-frequency test programs
•
Minimizes the amount of time the system needs to recover from transitions
or transients
Keep in mind:
•
Higher integral gain settings increase system response.
•
Too much integral gain can cause a slow oscillation (hunting).
•
You may want to use the max/min display to monitor the mean level, reset
the display, and check it again.
Integrator limit
The Integrator Limit control allows you to set the maximum integrator value as a
percentage of full-scale output.
Derivative (D) Gain
Derivative gain is an adjustment you may or may not need. Another name for
derivative gain is Rate gain.
Get back into the car and back on the race track. Only now you are going really
fast and the curves are electrifying. But it is a race, so you are actually
accelerating while in the short straightaways.
Overshoot
Hunting
Droop
Excessive Reset
Reset Too High
Mean Level Stability
Reset Too Low