IAI America SSPDACR User Manual
Page 23
2. Specification
15
(2) SSPDACR
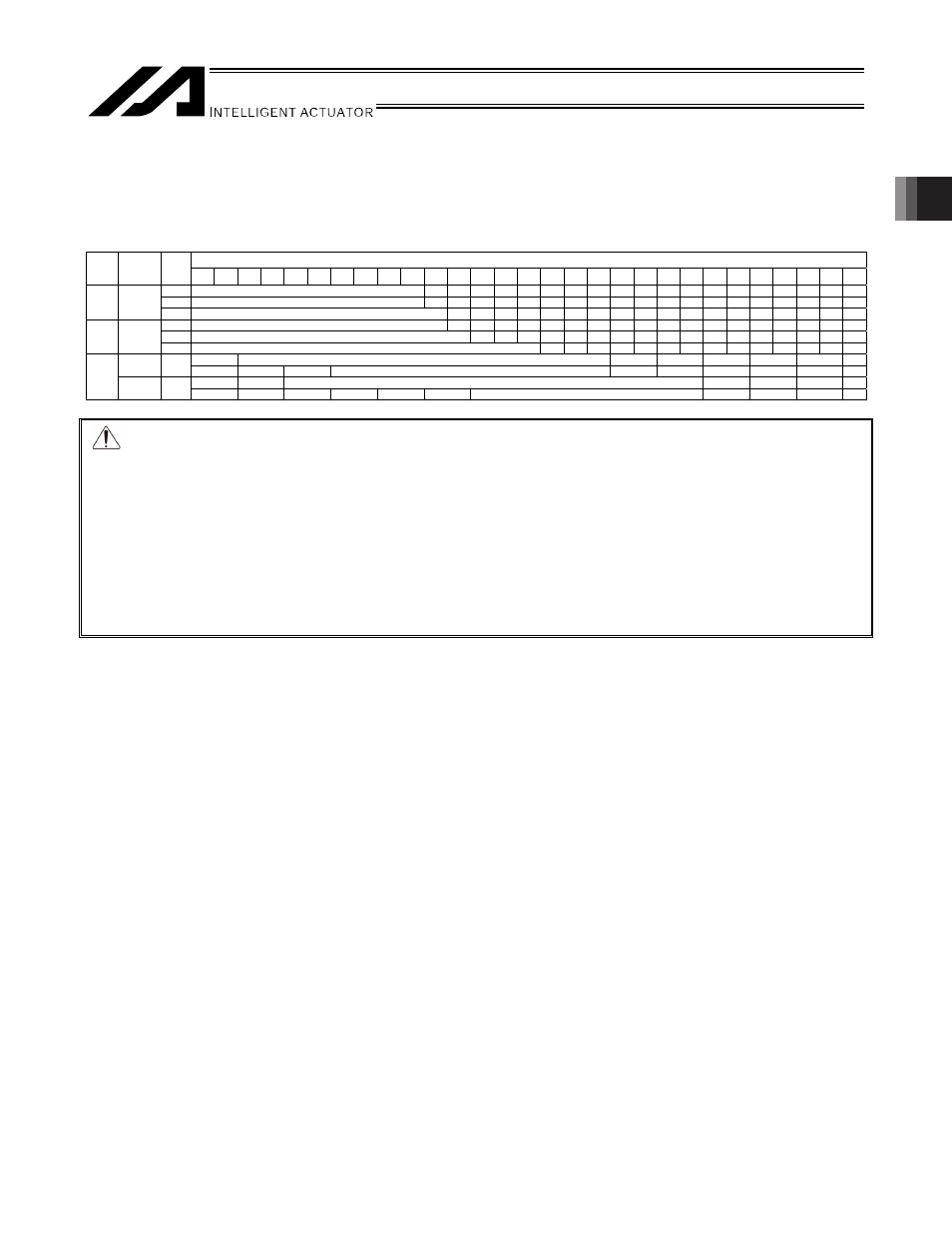
The maximum speed of the actuator is limited to prevent resonance of the ball screw shaft that may occur beyond
a certain motor speed.
Be sure to observe the applicable maximum speed shown in the table below.
Stroke and maximum speed (or speed to reach) limits (Unit: mm/s)
Stroke [mm]
Size
Motor
capacity
[W]
Lead
[mm] 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900 950 1000 1050 1100 1150 1200 1250 1300 1350 1400 1450 1500
10
600
540 480 430 380 340 310 280 260 240 220 200 -
-
-
-
-
-
-
-
20
1100
1090 970 880 770 690 630 570 520 480 440 400 -
-
-
-
-
-
-
-
S
200
30
1600
1450 1290 1160 1040 940 860 780 720 660 610 -
-
-
-
-
-
-
-
10
600
580 520 470 420 380 350 320 290 270 250 230 220 200 190
-
-
-
-
20
1100
1040 940 850 770 700 640 590 550 500 470 440 410 380
-
-
-
-
M
400
40
1600
1540 1410 1290 1180 1100 1010 940 880 820 760
-
-
-
-
1080
1100
1060
900
770
670
580
520
750
25
620
880
1080
1100
1060
900
770
670
580
520
1080
1530
1600
1550
1340
1170 1040
L
750
50
620
880
1080
1250
1400
1530
1600
1550
1340
1170 1040
Caution:
(1) Do not set speeds and accelerations/decelerations equal to or greater than the respective ratings.
Doing so may result in vibration, failure or shorter life.
(2) In the case of interpolated operation of two or more orthogonal axes, make sure the command values
(settings) of speed and acceleration/deceleration do not exceed the smallest values of all speeds and
accelerations/decelerations of the applicable axes.
Even if any speed or acceleration/deceleration is set that exceeds the smallest speed or
acceleration/deceleration among all applicable axes, the actual speed or acceleration/deceleration will
be clamped to the smallest speed or acceleration/deceleration.
(3) If any acceleration/deceleration equal to or greater than the rated acceleration/deceleration is set, a
creep phenomenon or slipped coupling may occur.