Optimization functions, Advance control measures – Parker Products COMPAX-M /-S (L) User Manual
Page 129
Optimization functions
Optimization parameters
129
Unit
hardware
Connector
assignment / cable
Technical data
Configuration
Positioning and
control functions
Optimization
functions
Interfaces
Accessories /
options
Status
Parameter
Error list
Advance control of speed, acceleration and power
♦
Minimum lag error
♦
Better attenuation characteristics
♦
Higher dynamic levels with lower maximum current
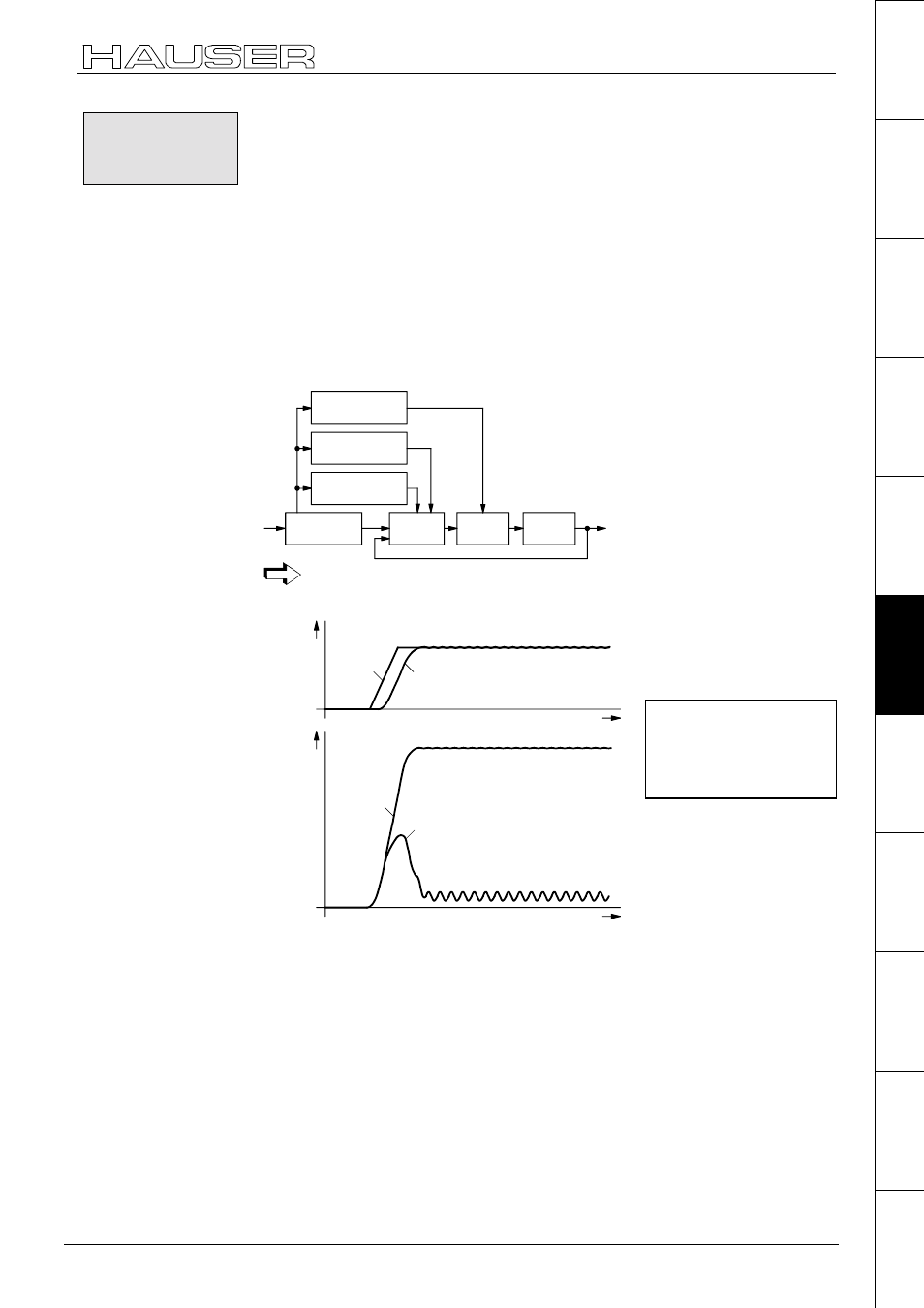
The positioning process is calculated in the nominal value setter and is specified to
the position controller as the nominal value. This ensures that the nominal value
setter contains the advance information required for positioning: speed,
acceleration and power processes. This information is switched to the controller so
the lag error is reduced to a minimum, the controller has better attenuation
characteristics and drive dynamics are increased.
current
feed forward
acceleration
feed forward
speed
feed forward
target
posi-
tion reference point
target
position
control
speed
control
position
integrator
position
actual
value
The stability of the control process is not influenced by the advance control
measures.
Reference
value,
actual
value
t
Driving
fault,
current
t
1
2
4
3
Advance
control
measures
Advantages:
Principle:
Main structure:
Without advance
control measures:
1: Nominal speed value
2: Actual speed value
3: Motor power
4: Lag error