Format – Yaskawa MP900 Series Machine Controller New Ladder Editor User Manual
Page 147
1.7 DDC Instructions
1-137
1
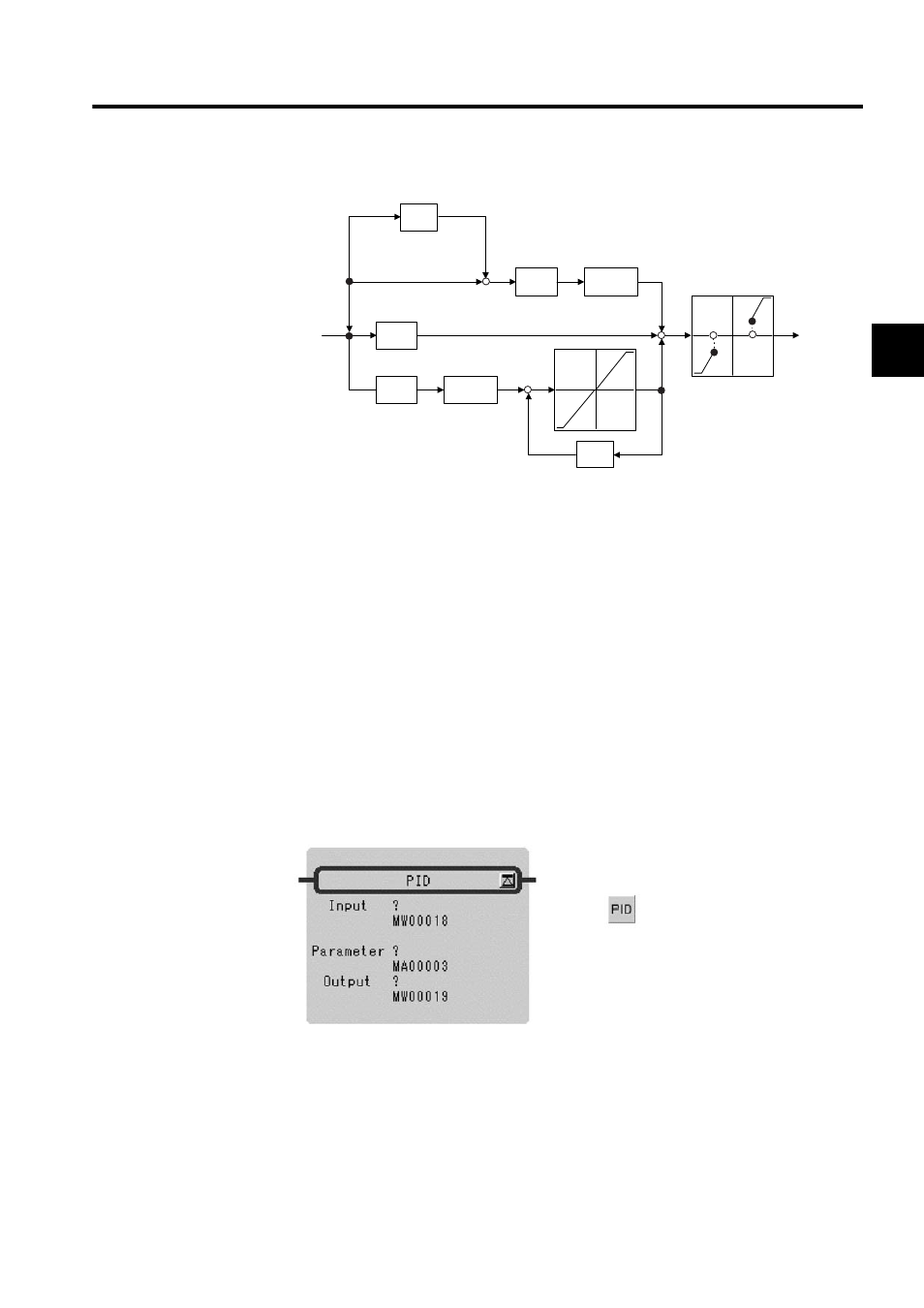
Block Diagram
• When the P + I + D offset reaches the upper or lower PID limit (UL, LL) or the PID
dead band (DB)
When the present P offset and the I offset are the same in sign (diverging), the I offset is
not renewed but is kept at the previous value. Oppositely, if the P and I offsets are oppo-
site in sign (converging towards 0), the I offset is renewed with the present value.
• When the change in deviation output (X-X’) and the previous deviation input X’
are the same in sign (diverging) in the differential (D) operation
The divergence differential time (Td1) is used as the differential time.
• When the change in deviation output (X-X’) and the previous deviation input X’
are opposite in sign (converging) in the differential (D) operation
The convergence differential time (Td2) is used as the differential time.
• When the integration reset (IRST) is "ON"
Yi
= 0 and IREM = 0 are output.
Format
Input
X
Output
Y
LIMIT, DB
Ki
Ts/Ti
I LIMIT
+
+
+
Kd
Td/Ts
+
+
+
Kp
Z
-1
Z
-1
-
Symbol: PID
Full Name: PID Control
Category: DDC
Icon: