Yaskawa MP900 Series Machine Controller New Ladder Editor User Manual
Page 146
1 Ladder Program Instructions
1.7.6 PID CONTROL Instruction (PID)
1-136
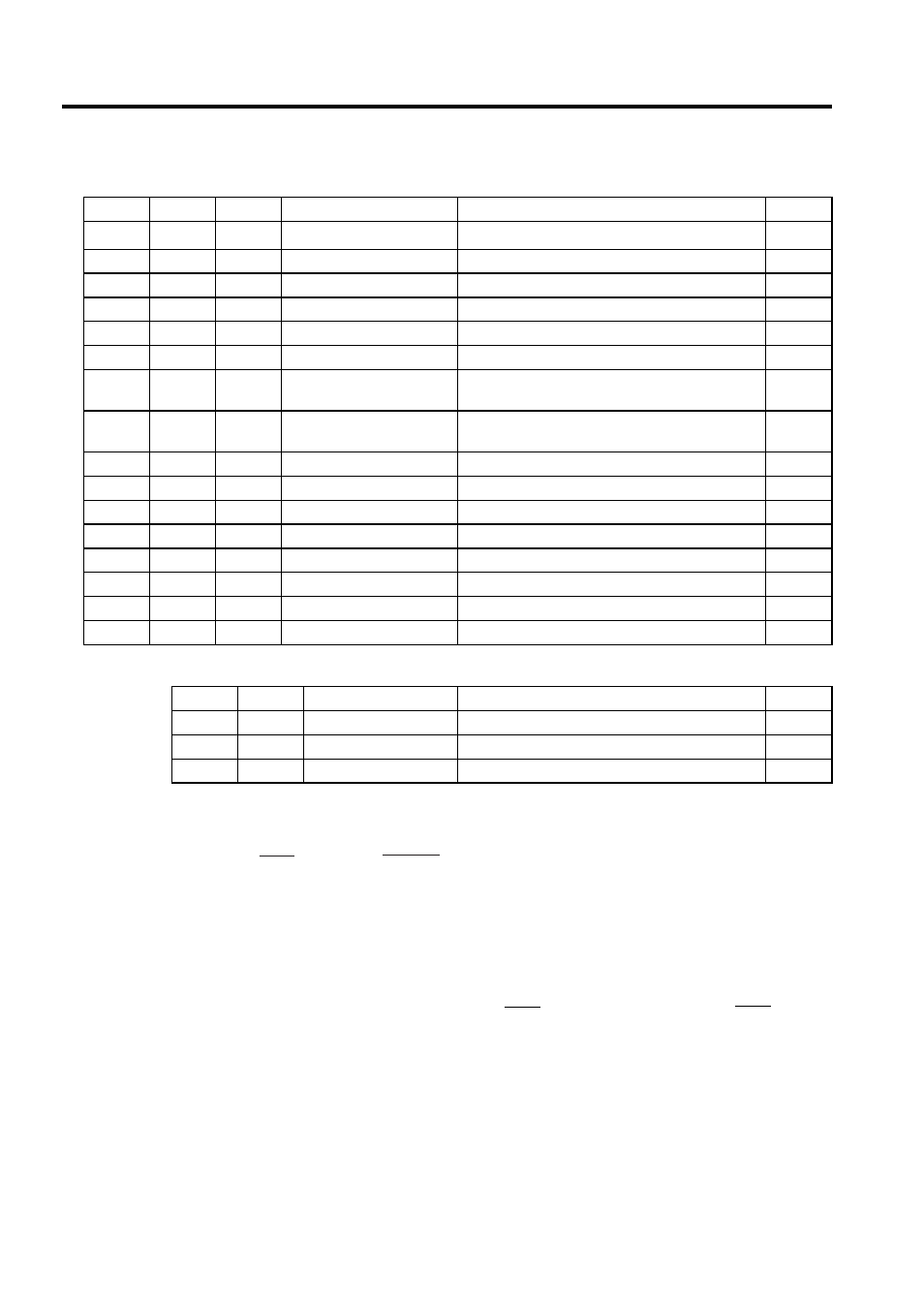
* Relay I/O Bit Assignment
Here, the PID operation is expressed as follows:
The following opertion is performed within the PID instruction:
Table 1.17 Real Number Type PID Instruction Parameters
ADR
Type
Symbol
Name
Specifications
I/O
0
W
RLY
Relay I/O
Relay input, relay output
∗
IN/OUT
1
W
−
(Reserved)
Reserved register
−
2
F
Kp
P gain
Gain of the P offset
IN
4
F
Ki
I gain
Gain of the integration circuit
IN
6
F
Kd
D gain
Gain of the differentiation circuit input
IN
8
F
Ti
Integration time
Integration time (ms)
IN
10
F
Td1
Divergence differential
time
The differential time (s) used in the case of diverging
input.
IN
12
F
Td2
Convergence differential
time
The differential time (s) used in the case of converg-
ing input.
IN
14
F
IUL
Upper integration limit
Upper limit for the I offset
IN
16
F
ILL
Lower integration limit
Lower limit for the I offset
IN
18
F
UL
Upper PID limit
Upper limit for the P + I + D offset
IN
20
F
LL
Lower PID limit
Lower limit for the P + I + D offset
IN
22
F
DB
PID output dead band
Width of the dead band for the P + I + D offset
IN
24
F
Y
PID output
PID offset output (also output to the A register)
OUT
26
F
Ti
I offset
I offset stored
OUT
28
F
X
Input value storage
Present deviation input value stored
OUT
BIT
Symbol
Name
Specifications
I/O
0
IRST
Integration reset
"ON" is input when integration is reset.
IN
1 to 7
−
(Reserved)
Reserved relay for input
IN
8 to F
−
(Reserved)
Reserved relay for output
OUT
Y 1
X = Kp + Ki ×
×
Ti S
+ Kd
× Td × S
X: deviation input value
Y: output value
Ti Td
Y
= Kp X + {
}
( Ki
×
×
×
×
X + IREM ) /
Ts
+ Yi
+ Kd
( X – X )
Ts
X : previous input value
Yi : previous I output value
Ts: scan time setting
,
,
,
,