Measurement Computing Data Acquisition Systems rev.10.4 User Manual
Page 15
User Buffer Model Operation
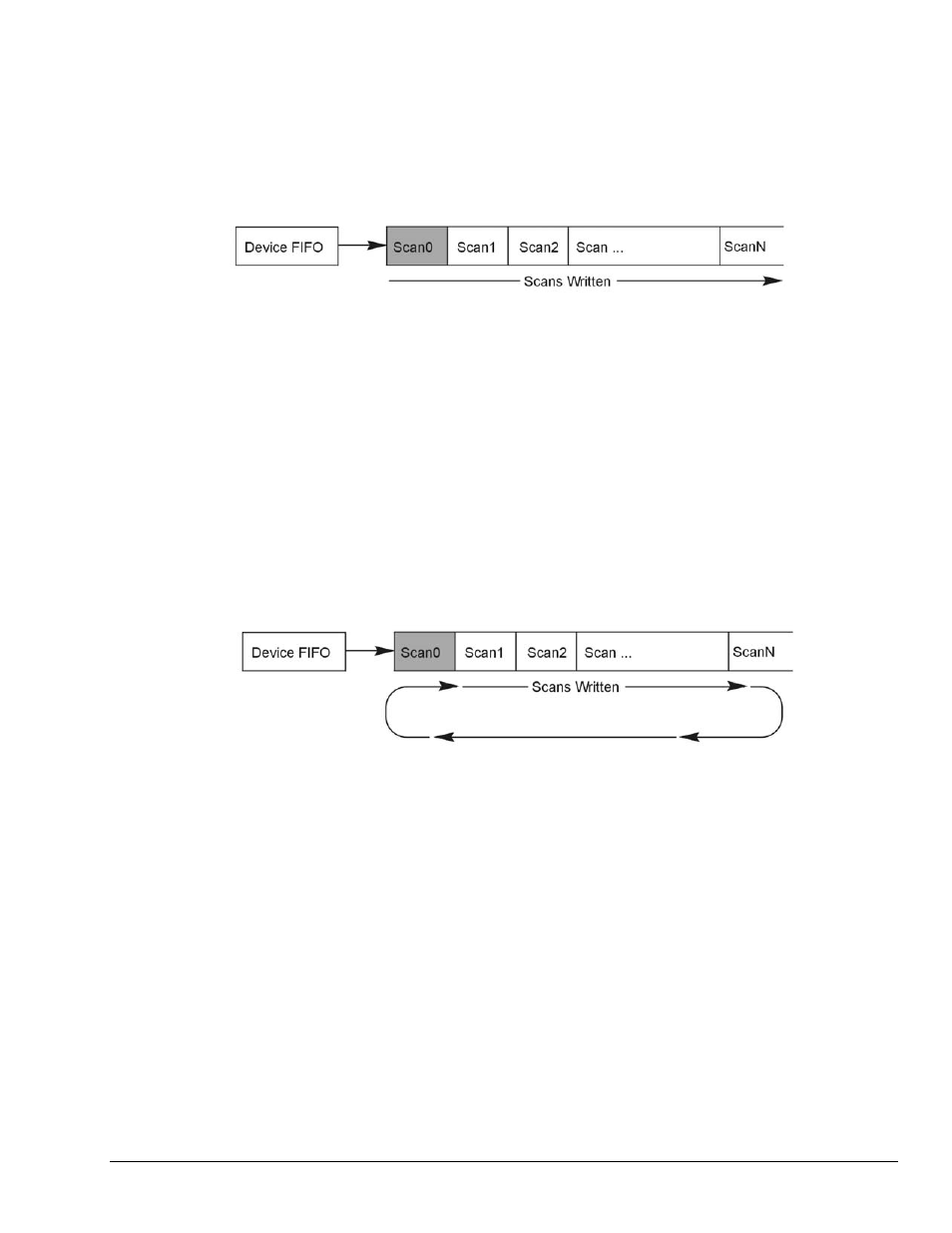
The User Buffer Model allows the user to specify either a linear buffer or circular buffer mode.
When the linear buffer mode is selected the driver will start filling the buffer from the
beginning of the buffer with the newest available scans. Once the entire buffer has been filled
to the number of scans specified the driver will stop writing scan data to the buffer even
though the acquisition may continue.
In the User Buffer Linear mode the driver will stop writing data to the user buffer once the
total number of scans requested has been satisfied. If the acquisition continues to run after
this point scan data will accumulate in the device FIFO until another buffer (or the same
buffer) transfer has been started or the device FIFO overruns. The implication of this is that
when using linear buffers it is important to make sure that a buffer transfer remains active
during the course of the acquisition or data loss may result. In other words, if the acquisition
continues past the end of the specified buffer another transfer (into the same or a different
buffer) must immediately be initiated. While it is possible to ping pong linear buffers in this
manner it is not the recommended. Linear buffers should normally be used only when a
predetermined number of scans are to be collected for the acquisition. In this case the buffer
scan length should be set to to be the same size as the aggregate scan size [of the total
acquisition]. For more information about starting transfers see Step 5.
The User Buffer Model also has a Circular Buffer Mode. In the circular buffer mode the driver
will continue to write scan data into the User Buffer until the acquisition terminates on its own
or is aborted by the user/application. Unlike the Linear Buffer model when the end of the user
buffer is reached the driver will continue to write scan data starting at the beginning of the
buffer.
When using the Circular Buffer mode the application does not need to make sure that there is
always a buffer ready to take the scan data because the driver simply continues to fill the
specified buffer and, when necessary, will begin writing data at the beginning of the buffer.
This model ensures that a device FIFO overrun never occurs because the driver always has
place to store the data (as long as the interface is capable of the required throughput). The
application is required to monitor the transfer and remove and/or process data as it becomes
available (See Step 7 on monitoring and receiving scan data). However a User Buffer overrun
may occur if the controlling application cannot keep up in processing or removing the data
from the buffer. Therefore the application should allocate a large enough buffer to alleviate
any processing or other latencies that may be present in the system or the application. If
making the buffer larger does not alleviate user buffer overrun problems then it may be
necessary to upgrade the PC to a higher performance unit. The type of upgrade required will
be highly dependent upon the nature of the application as well as operating environment in
general. For instance, if taking data to disk then a faster HD and controller may be required.
If mathematical manipulation of the data is taking place then a faster CPU may be in order. If
graphics or video are used intensively then the solution may be a higher performance video
card. It is important to remember that the application and other tasks within the system can
have an impact on the overall performance of the data acquisition process.
Programmer’s Manual
988594
API Programming, General Models 2-5