Timers – Basler Electric BE1-BPR User Manual
Page 71
9272000990 Rev J
BE1-BPR Functional Description
4-19
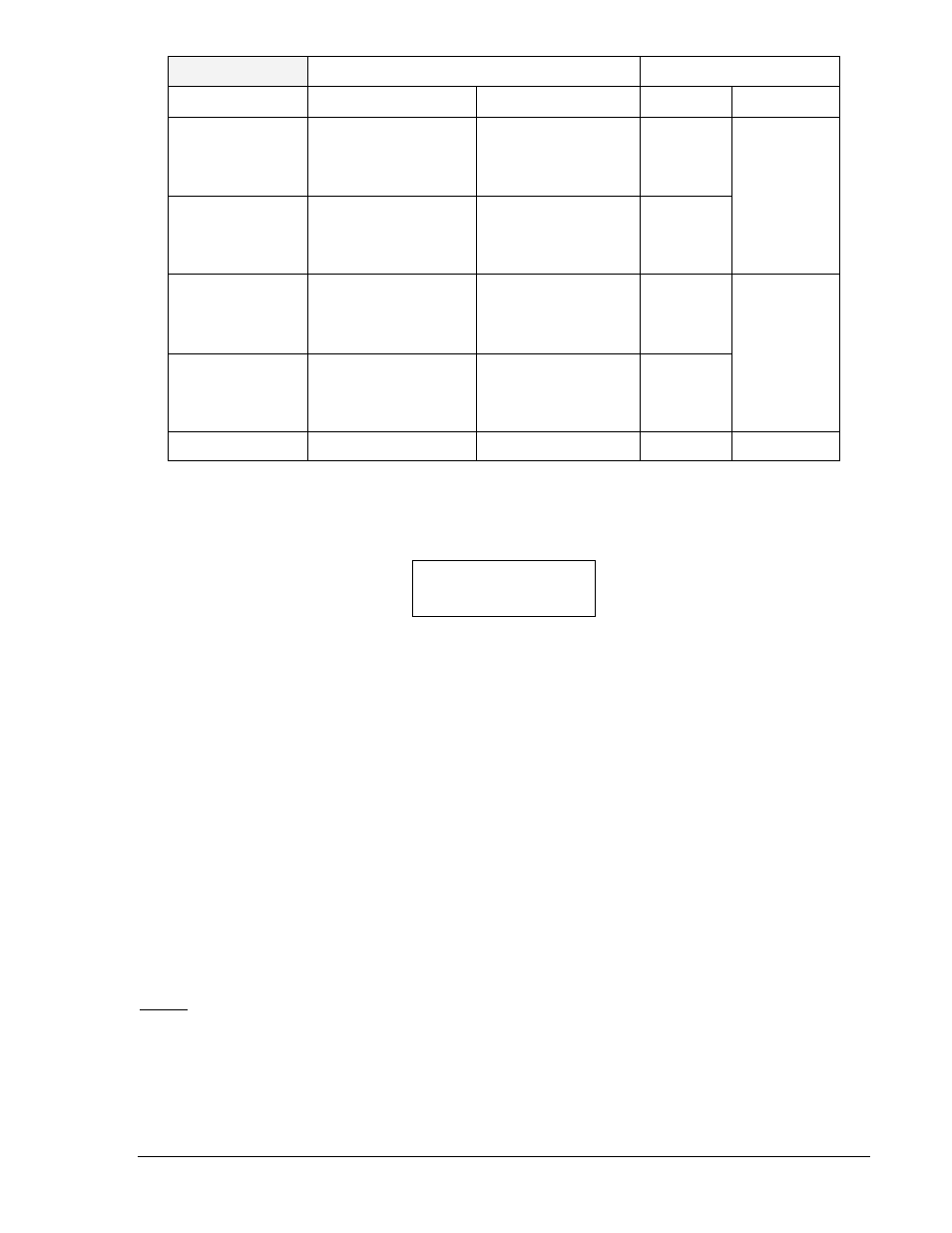
PU
Fault detector pickup levels
HMI Menu Branch: 1
Parameter
Unit of Measure
Range
Increment
Default
level
5 A CT
LFx=type,1 or 3 ∗
Amperes
0.25 to 9.99
0.01
PU1=8.00
PU2=2.00
PU3=0.50,10
level
5 A CT
LFx=type,2
Amperes
0.05 to 1.00
0.01
level
1 A CT
LFx=type,1 or 3 ∗
Amperes
0.05 to 2.00
0.01
PU1=2.00
PU2=2.00
PU3=0.20,10
level
1 A CT
LFx=type,2
Amperes
0.01 to 0.10
0.01
cycles
cycles
1 to 100
1
N/A
∗
Types 1 and 3 PU settings can be set below the stated minimum settings. However, specified
accuracies will not be maintained when PU settings are set outside the setting range.
PU HMI Screen Example:
PU Command
Purpose:
Read or change fault detector pickup levels.
Syntax:
PU[x][=
Comments:
x = 1 (fault detector 1), 2 (fault detector 2), or 3 (fault detector 3)
level = pickup level in amperes for fault detector x
cycles = number of moving average filter cycles
Cycles parameter is used only if an analog channel is programmed to have a moving
average filter (Lfx=type,2). See LF command information in BESTlogic Functions section.
An access area 1 or 2 password is required to change settings.
PU Command Examples:
1. Set the analog channel pickup level at 6.2 amperes.
PU1=6.2
2. Read the pickup setting for all channels.
PU
PU1=6.2;
PU2=0.5;
PU3=0.1,10
Six independent timers are provided in the BE1-BPR. Each timer consists of a time delay setting (TD[x]),
a start input, a reset input, and an output (T[x]). Timing starts when the start input is true and the reset
input is false. The timer runs for the duration of the time delay setting unless the reset input becomes true.
When the time delay expires, the output changes state. A timer can be configured as a delay or control
timer with independent or dependent start and reset conditions. Timers can be used to provide a
diagnostic log and/or alarm. Figure 4-6 illustrates the timer circuit components.
Timers
PU1 PU2 PU3
8.00 2.00 0.50