2 absolute and relative position move, 3 trapezoidal speed profile – ADLINK PCI-8102 User Manual
Page 55
44
Operations
absolute command to move a motor to 10,000 pulses position and
current position read from encoder is 3500 pulses, how many
pulses will it send to motor driver Δ The answer is (10000 – 3500 )
/ (10,000 / 1,000)=650 pulses. The motion controller will calculate
it automatically if users set “move ratio” already. The “move ratio”
means the (feedback resolution/command resolution).
4.2.2
Absolute and Relative Position Move
In the coordinate system, we have two kinds command for users
to locate the target position. One is absolute and the other is rela-
tive. Absolute command means that user give the motion control-
ler a position, then the motion controller will move a motor to that
position from current position. Relative command means that user
give the motion controller a distance, then the motion controller
will move motor by the distance from current position. During the
movement, users can specify the speed profile. It means user can
define how fast and at what speed to reach the position.
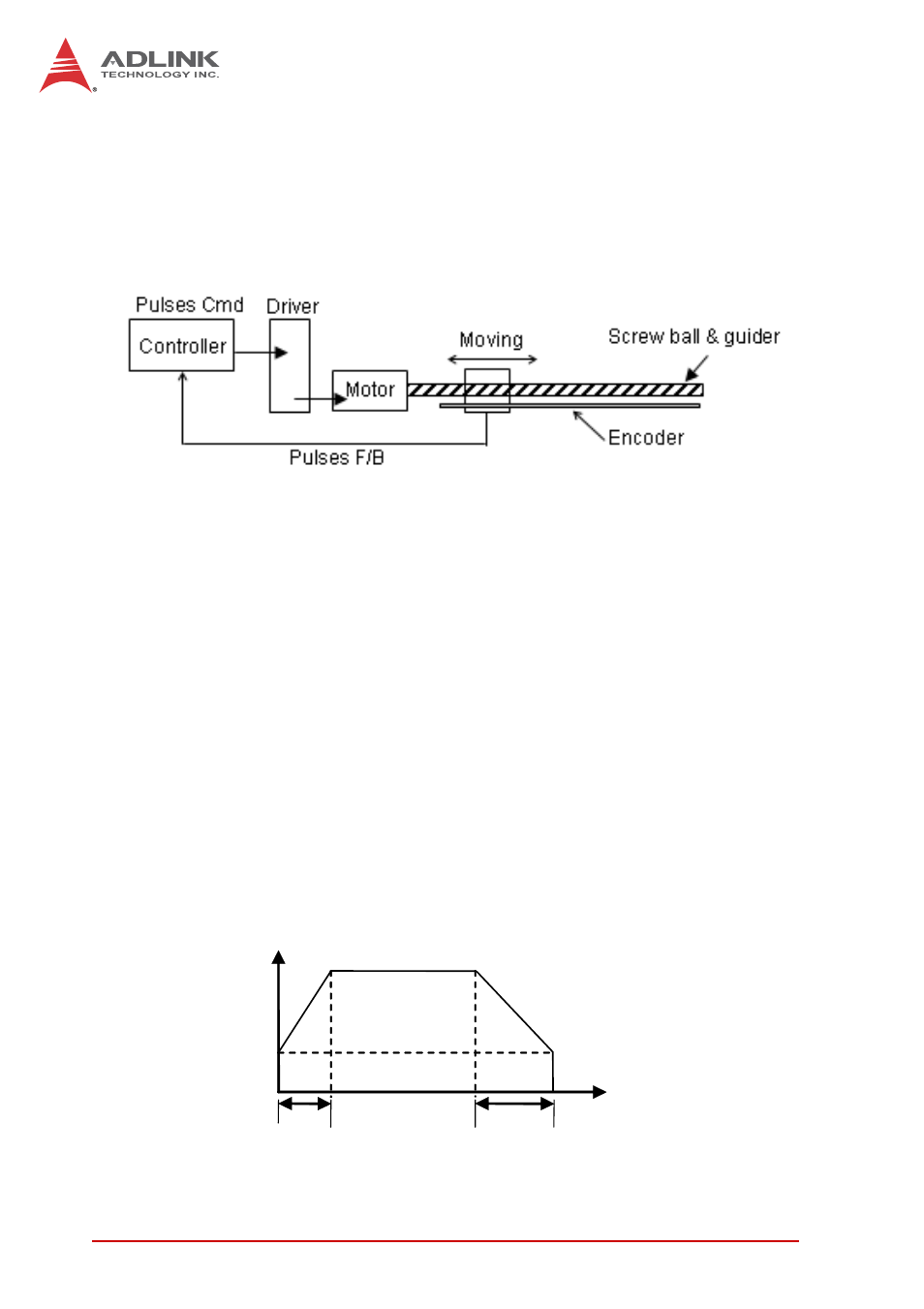
4.2.3
Trapezoidal Speed Profile
Trapezodial speed profile means the acceleration/deceleration
area follows a 1st order linear velocity profile (constant accelera-
tion rate). The profile chart is shown as below:
Ve
lo
c
ity
(pps)
StrVel
Tacc
Tdec
MaxVel
StrVel
Time
(second)