7 interrupts, 7 interrupts -7, Maxq family user’s guide: maxq8913 supplement – Maxim Integrated MAXQ Family Users Guide: MAXQ8913 Supplement User Manual
Page 16
MAXQ Family User’s Guide:
MAXQ8913 Supplement
2-7
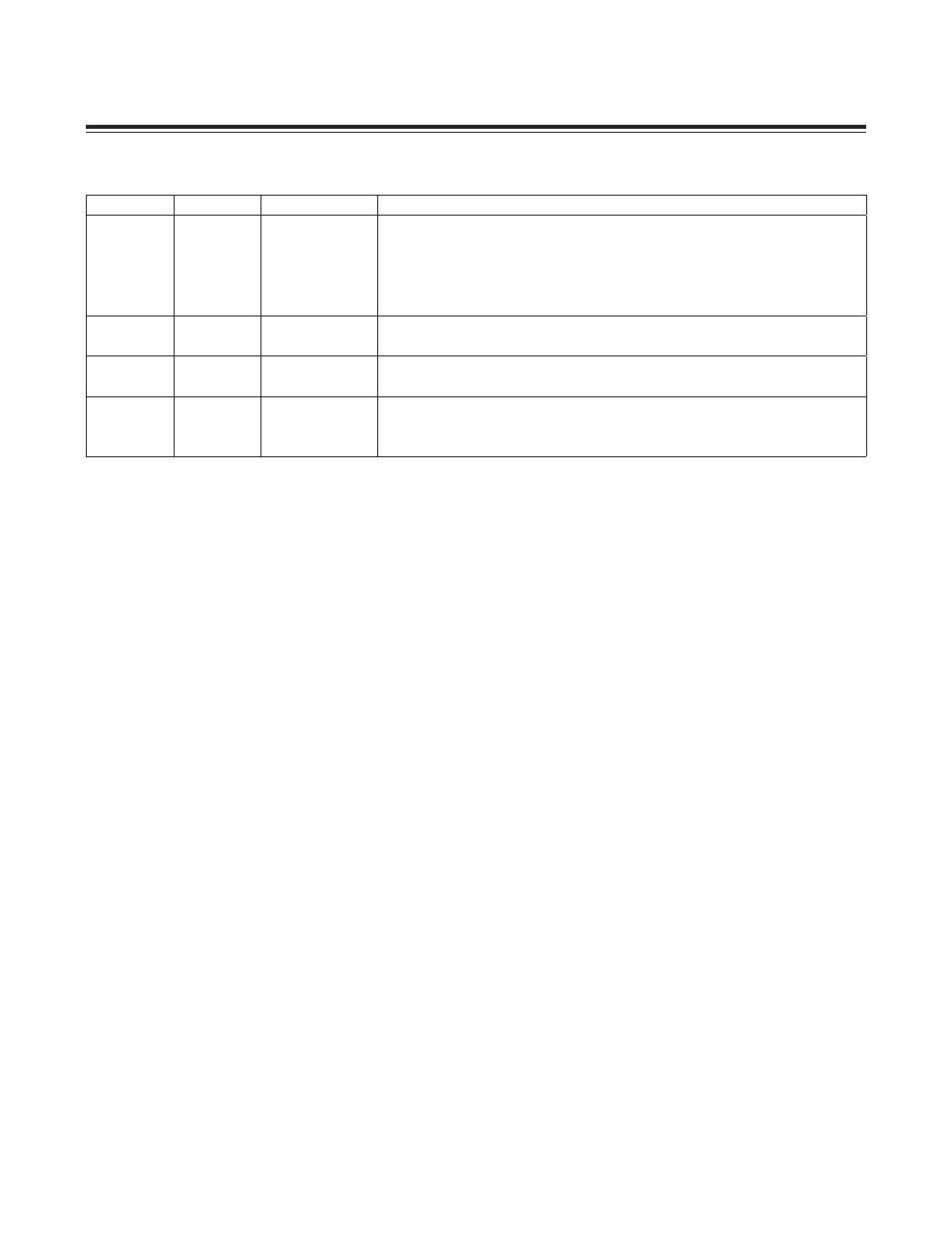
Table 2-1. System Clock Generation and Control Registers
Because the RGSL bit is cleared by power-on reset only, if this bit is set before entering stop mode, the ring oscillator
is still used as the system clock source when stop mode is exited. In this case, a 10-ring oscillator cycle warmup delay
is required when exiting stop mode before execution resumes using the ring oscillator as the system clock source.
When the system clock source is switched back from the ring oscillator to the high-frequency oscillator by clearing
RGSL to 0, the ring oscillator is still used as the system clock source until the warmup period has completed for the
high-frequency oscillator. This is reflected by the value of the RGMD bit, which remains at 1 until the warmup for the
high-frequency oscillator has completed and the clock switches over, at which point RGMD switches to 0.
2.7 Interrupts
In general, interrupt handling on the MAXQ8913 operates as described in the MAXQ Family User’s Guide. All interrupt
sources have the same priority, and all interrupts cause program execution to branch to the location specified by the
Interrupt Vector (IV) register, which defaults to 0000h.
Table 2-2 lists all possible interrupt sources for the MAXQ8913, along with their corresponding module interrupt enable
bits, local interrupt enable bits, and interrupt flags.
• Each module interrupt enable bit, when cleared to 0, blocks interrupts originating in that module from being acknowl-
edged. When the module interrupt enable bit is set to 1, interrupts from that module are acknowledged (unless all
interrupts have been disabled globally).
• Each local interrupt enable bit, when cleared to 0, disables the corresponding interrupt. When the local interrupt-
enable bit is set to 1, the interrupt is triggered whenever its interrupt flag is set to 1 by hardware or by software.
• Each interrupt flag bit, when set to 1, causes its corresponding interrupt to trigger. Interrupt flag bits are typically set
by hardware and must be cleared by software (generally in the interrupt handler routine).
Note that for an interrupt to fire, the following five conditions must exist:
• Interrupts must be enabled globally by setting IGE (IC.0) to 1.
• The module interrupt enable bit for the interrupt source’s module must be set to 1.
• The local interrupt enable bit for the specific interrupt source must be set to 1.
• The interrupt flag for the interrupt source must be set to 1. Typically, this is done by hardware when the condition
that requires interrupt service occurs.
• The interrupt-in-service (INS) bit must be cleared to 0. This bit is set automatically upon vectoring to the interrupt
handler (IV) address and cleared automatically upon exit (RETI/POPI), so the only reason to clear this bit manually
(inside the interrupt handler routine) is to allow nested interrupt handling.
REGISTER
ADDRESS
BIT(S)
FUNCTION
CKCN
M8[0Eh]
[2:0]—PMME,
CD[1:0]
000: System clock = high-frequency clock divided by 1.
001: System clock = high-frequency clock divided by 2.
010: System clock = high-frequency clock divided by 4.
011: System clock = high-frequency clock divided by 8.
1xx: System clock = high-frequency clock/256.
CKCN
M8[0Eh]
5—RGMD
0: System clock is being provided by an external source.
1: System clock is being provided by the ring oscillator.
CKCN
M8[0Eh]
6—RGSL
0: Selects an external source for system clock generation.
1: Selects the ring oscillator for system clock generation.
PWCN
M0[0Ch]
0—HFXD
0: High-frequency oscillator operates normally (default).
1: Disables the high-frequency oscillator, allowing an external clock to be
provided at HFXIN.
Maxim Integrated