Rockwell Automation 1771-QC , D17716.5.25 SER/B SERVO POS User Manual
Page 16
Positioning Concepts
Chapter 3
3Ć3
Positioning Loop
When we want to move the slide a specific distance, we can turn the
motor on at a specific velocity for a specific length of time. However, this
could produce imprecise positioning. To accurately control the position
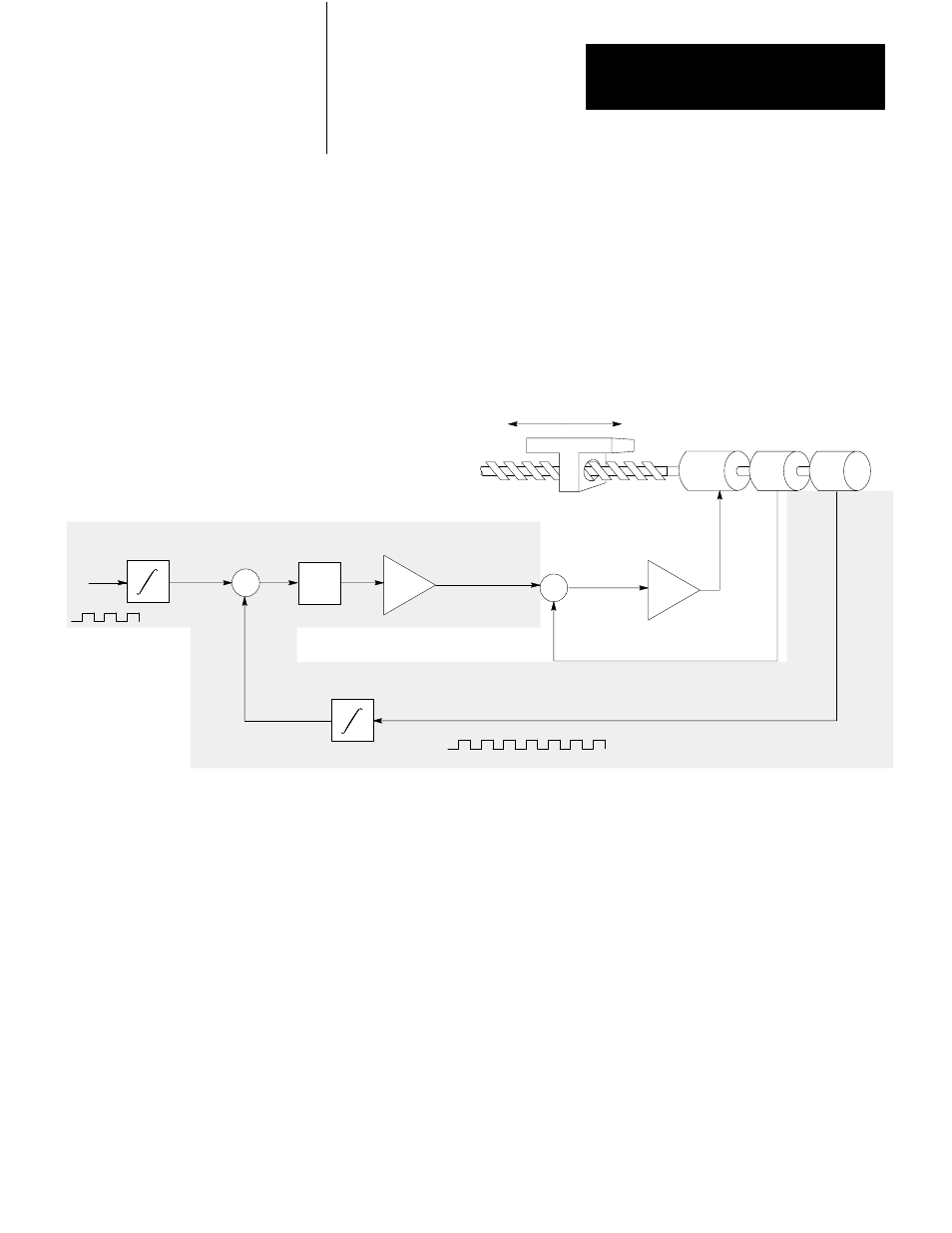
of the slide, we need a positioning loop (Figure 3.3).
Figure 3.3
Velocity Loop and Positioning Loop
Axis Motion
Motor
Tach
-
+
Velocity
Command
Velocity Feedback
Encoder
Incremental Position Feedback
K1
-
+
Axis
Feedrate
Position
Command
Following
Error
D/A
12001
Following Error = (Position Command) - Position
Position
Amplifier
The positioning loop includes a summing point, an amplifier, a D/A
converter, and an incremental digital encoder to produce a position
feedback signal. The axis feedrate is integrated in a register to produce
the position command value. Incremental position feedback is integrated
in a register to produce the actual position value. The position value is
subtracted from the position command value. The difference is the
following error, which is amplified and converted to an analog velocity
command signal. This signal directs the axis to move in the right
direction; the position value moves closer to the position command value.
The following error is a function of the axis velocity divided by the
positioning-loop gain (K1). The following error is multiplied by the gain