Rockwell Automation 1771-QC , D17716.5.25 SER/B SERVO POS User Manual
Page 119
Formatting and Interpreting Data Blocks
Chapter 7
7Ć37
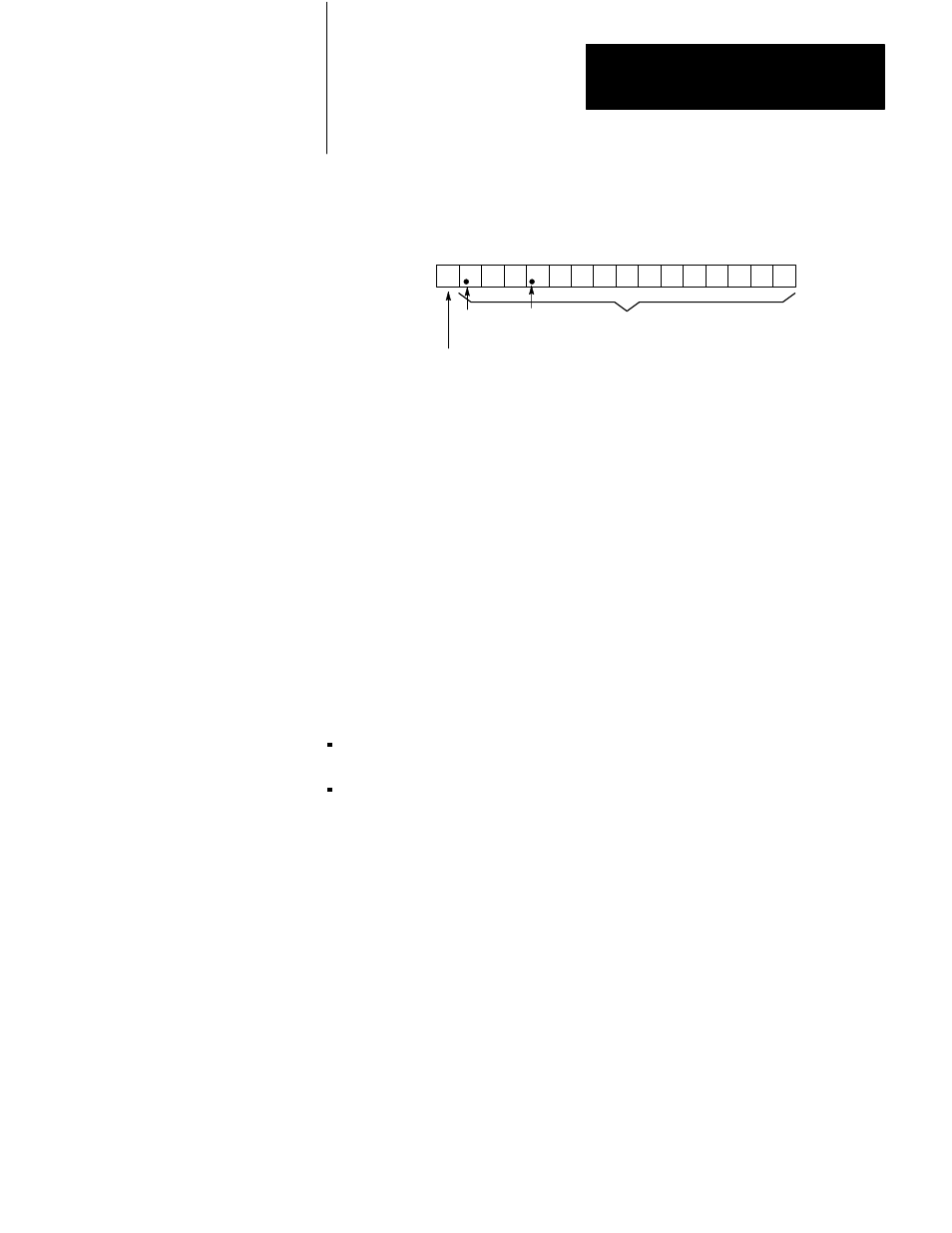
Figure 7.26
Backlash Takeup Word
17 16 15 14 13 12 11 10 07 06 05 04 03 02 01 00
Backlash Takeup Distance
Word 23 (Axis 1)
Word 42 (Axis 2)
Word 61 (Axis 3)
inch
metric
Distance axis overshoots when initial
approach to endpoint is from direction
opposite that specified in bit 17.
11048
Sign:
0 = +
1 = -
Axis approaches all
endpoints moving in the
direction specified by
the sign (bit 17).
decimal
point
decimal
point
In this word, bit 17 specifies the direction the axis is to move in
approaching all programmed endpoints. When the axis approaches an
endpoint at which it is to stop while moving in the specified direction, it
simply stops at the endpoint. If the axis approaches the endpoint from the
opposite direction,it overshoots the endpoint by the amount you specify in
bits 00 thru 16, then returns to the endpoint from the opposite direction.
Consider the example of your entering +.0010 in the backlash takeup
word:
If the axis is moving in the positive direction it stops at the
programmed endpoint without overshoot.
If the axis is moving in the negative direction, it overshoots the
endpoint by 0.001 inch, then returns to the programmed endpoint.
Backlash takeup affects only halt moves that command the axis to stop at
a move endpoint. For blended moves, backlash takeup has no effect.
Also, backlash takeup is active only in auto mode. Backlash takeup has
no effect on axis motion in the manual mode.
This parameter has a 4-digit BCD value in the range of 0.0001 to 0.7999
inches or 0.001 to 7.999 mm.
Offset
Word 24 (43, 62) specifies the value the servo positioning assembly adds
to the offset accumulator when the servo positioning assembly executes
one of the following: