Rockwell Automation 1771-QC , D17716.5.25 SER/B SERVO POS User Manual
Page 134
Formatting and Interpreting Data Blocks
Chapter 7
7Ć52
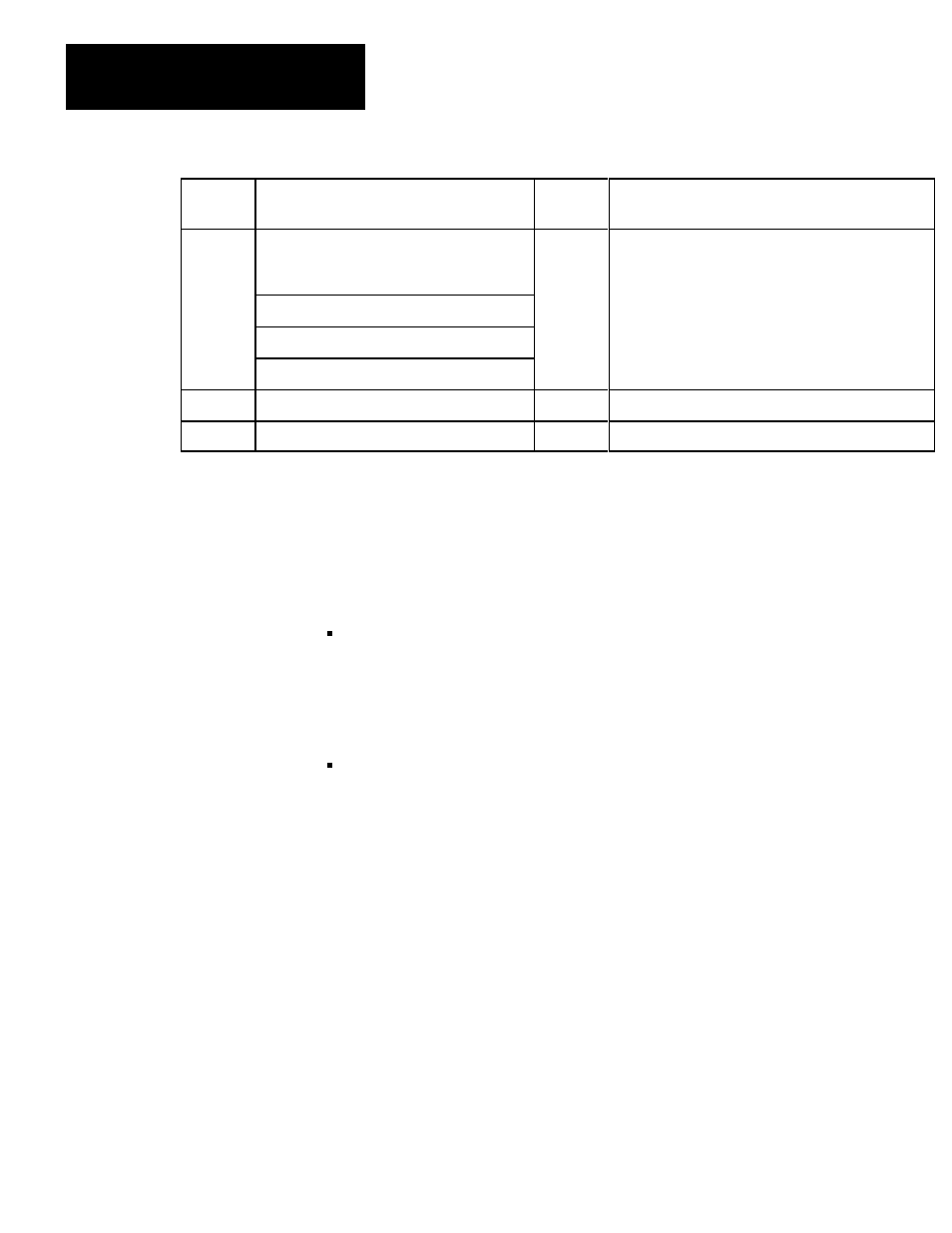
Comments
No. of
Words
Word
Position (MSW)
No Moveset words required to program
FeedrateĆĆvalue programmed inn parameter block
used.
Position (LSW)
Local Acc
Move 4
Local Dec
5
Next Moveset Pointer
1
This word is optional
Bit 16 Run/Halt
Bit 16 determines whether or not the move block after this one will
execute automatically without a motion command (start, next move, or
begin) from the command block. Bit 16 functions in conjunction with bit
17, single-step/continuous.
Run - If you turn off the run/halt bit, the servo positioning assembly
begins execution of the next move block immediately after completing
the current move block without waiting for a start or begin command.
If bit 17 is on (continuous), the moves are blended smoothly. If bit 17
is reset (single step), the axis decelerates to zero velocity before starting
the next move.
Halt - If you turn on the run/halt bit, the servo positioning assembly
decelerates the axis to zero velocity at the programmed endpoint, then
waits for a motion command before executing the next move block,
regardless of the setting of bit 17 (single-step or continuous).
The run/halt bit applies to all move blocks, including presets and dwells.
Figure 7.35 shows a moveset profile with examples of various
bit-16/bit-17 combinations. Table 7.C explains the various combinations
with reference to the figure.