Formatting and interpreting data blocks chapter 7 – Rockwell Automation 1771-QC , D17716.5.25 SER/B SERVO POS User Manual
Page 107
Formatting and Interpreting Data Blocks
Chapter 7
7Ć25
Use bits 16 and 17 of this word to select the feedback multiplier. The
feedback multiplier you select affects the value you must enter for the
feedback resolution word.
Gain Break Speed
At axis speed below the gain break value you enter into the gain break
word (Figure 7.15), servo gain is the initial gain programmed in the
preceding word.
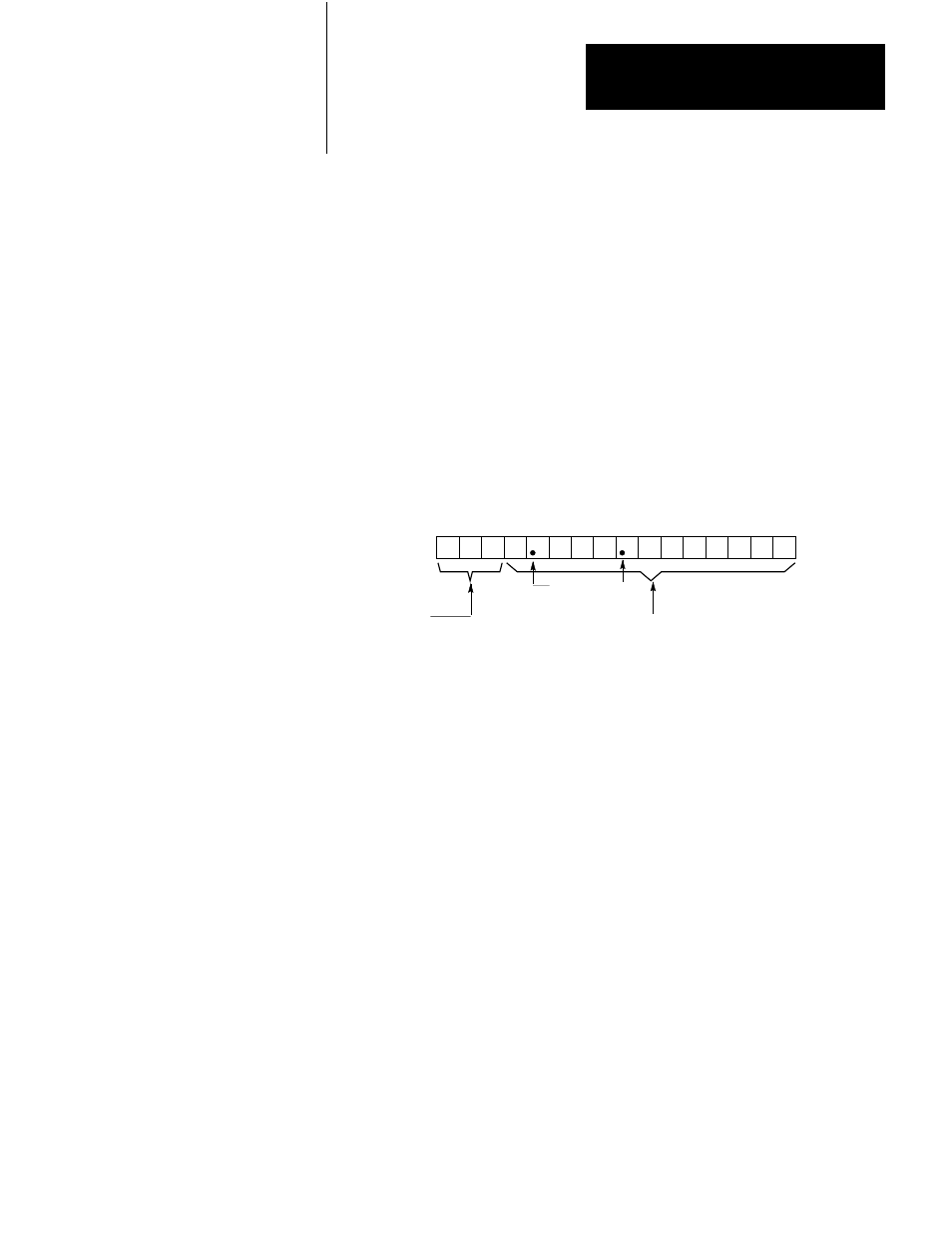
Figure 7.15
Gain Break Speed Word
17 16 15 14 13 12 11 10 07 06 05 04 03 02 01 00
Gain Break Speed
Word 10 (Axis 1)
Word 29 (Axis 2)
Word 48 (Axis 3)
Multiplier
001 = x 10
-1
000 = x 10
0
010 = x 10
100 = x 10
110 = x 10
111 = x 10
1
2
3
4
inch
metric
This BCD value (0.999 ipm or
19.99 mmpm max) times the
multiplier is the gain break speed.
11037
decimal
point
decimal
point
At speeds equal to and above the gain break value you enter into this
word, the servo positioning assembly reduces servo gain by the gain
reduction factor specified in the next word of the parameter block.
The gain break plot of Figure 7.16 illustrates the concept of gain break.
Typically, gain at axis speeds below the gain break velocity is relatively
high to allow precise axis positioning. Reduced gain at axis speeds above
gain break velocity allows for better stability at higher axis speeds.
Gain break velocity can be no greater than rapid traverse rate. If there is
to be no gain break point for an axis, program the rapid traverse speed in
this word.