Rockwell Automation 1336-GM6 Enhanced DeviceNet Communications Module User Manual
Page 102
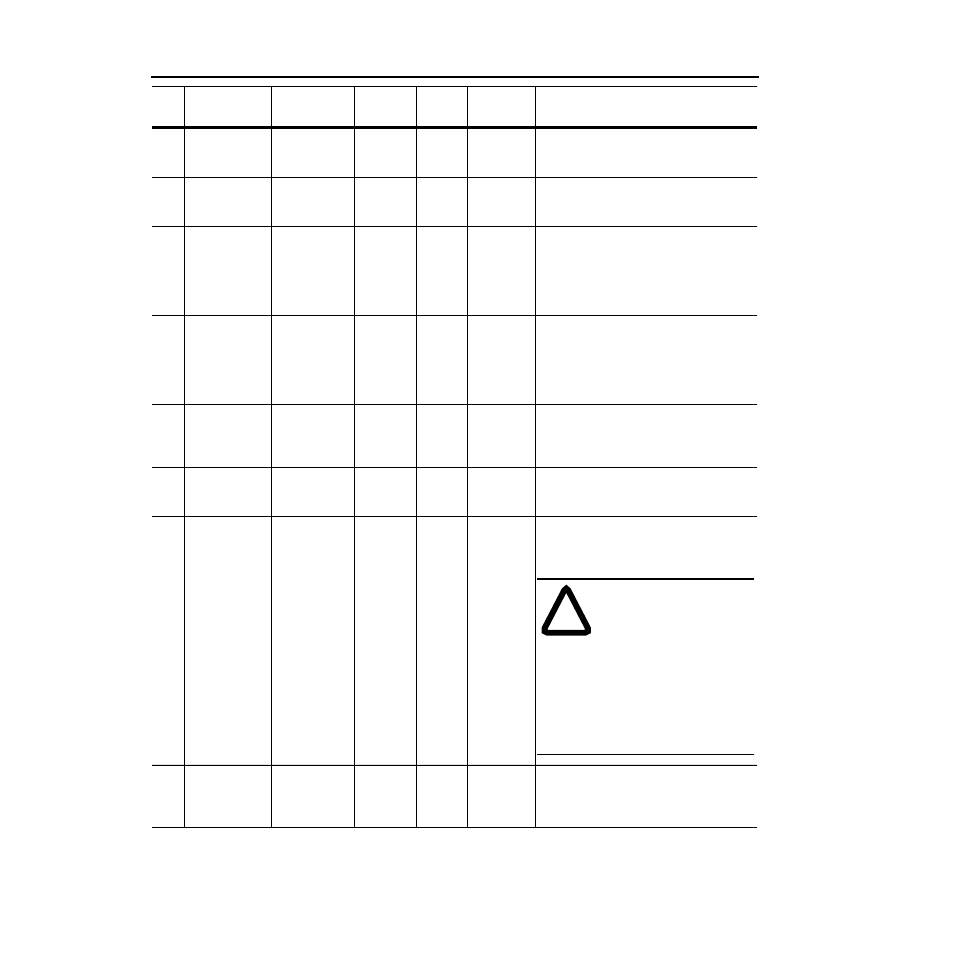
B-14
Enhanced DeviceNet Adapter’s Parameters
27
COS Feedback
Change
0 – 65535
0 = disable
Yes
No
Determines how much (+/-) the feedback word
can change before a message is sent during
COS operations.
28
COS/Cyc Interval
N/A
N/A
No
No
Displays the interval used by the controller to
check for data in the adapter during COS or
Cyclic allocation.
29
Peer A Input
Off,
Cmd/Ref
DL A Input
DL B Input
DL C Input
DL D Input
Off
Yes
No
Determines where the peer A input is sent in the
SCANport product.
Important: This parameter cannot be changed
when the Peer Inp Enable (36) parameter is On.
30
Peer B Input
Off
Cmd/Ref
DL A Input
DL B Input
DL C Input
DL D Input
Off
Yes
No
Determines where the peer B input is sent in the
SCANport product.
Important: This parameter cannot be changed
when the Peer Inp Enable (36) parameter is On.
31
Peer Cmd Mask
0 or 1 for each bit
0
Yes
Yes
Provides a mask for the Logic Command word
when it is received through peer input.
0 = Off (input received from Master)
1 = On (input received from Peer)
32
Peer Ref Adjust
0-200.00%
0
Yes
No
Provides the percentage of the Reference value
received through peer input that will be applied
to the SCANport reference value.
33
Peer Flt Action
Fault
Zero Data
Hold Last
Fault Cfg
Fault
Yes
No
Determines the action the adapter should
instruct the SCANport product to take if the
adapter does not receive peer input in the
allowed time.
34
Peer Node to Inp
0-63
0
Yes
No
Determines the node address of the node
producing I/O for the adapter to receive.
Important: This parameter cannot be changed
when the Peer Inp Enable (36) parameter is On.
#
Name
Valid Values/
Settings
Default
Writable
Reset or
Power Cycle
Description
Important: For information on accessing and editing parameters, refer to Chapter 3, Configuring the 1203-GU6 Using a Serial
Connection, or Chapter 4, Configuring the 1203-GU6 or 1336-GM6 Adapter Using RSNetWorx for DeviceNet.
!
ATTENTION: Risk of severe bodily
injury or equipment damage exists.
The
Peer Flt Action
(33) parameter
allows the user to change the default
configuration that would allow the
module and associated drive to
continue to operate if communication
is lost. Precautions should be taken
to assure that your settings for these
parameters and your application do
not create a hazard of bodily injury or
equipment damage.