West Control Solutions MRC 9000 User Manual
Page 26
Section 2
2-7
Edition 3
Rev G
2.3.1 SHIPPED CONFIGURATION/JUMPER POSITIONING
Each instrument is factory shipped with all parameters set to default values. These defaults are shown in the
"display" box for each parameter in Section 4.
Jumpers are used to condition the sensor inputs. All jumpers are located on the Input Board(s). The instrument is
shipped from the factory with these jumpers configured as follows:
JU1
IF FITTED
UPSCALE BREAK
JU2
Non-Contact Closure Input
JU3
T/C, mV, 0/1V, Switch, mA
JU4
IF FITTED
UPSCALE BREAK
JU5
Non-Contact Closure Input
JU6
T/C, mV, 0/1V, Switch, mA
JU7
WIDE SPAN
JU8
WIDE SPAN
JU11
IF FITTED
Non-RTD
JU12
IF FITTED
Non-RTD
JU15
Non-mA
JU16
Non-mA
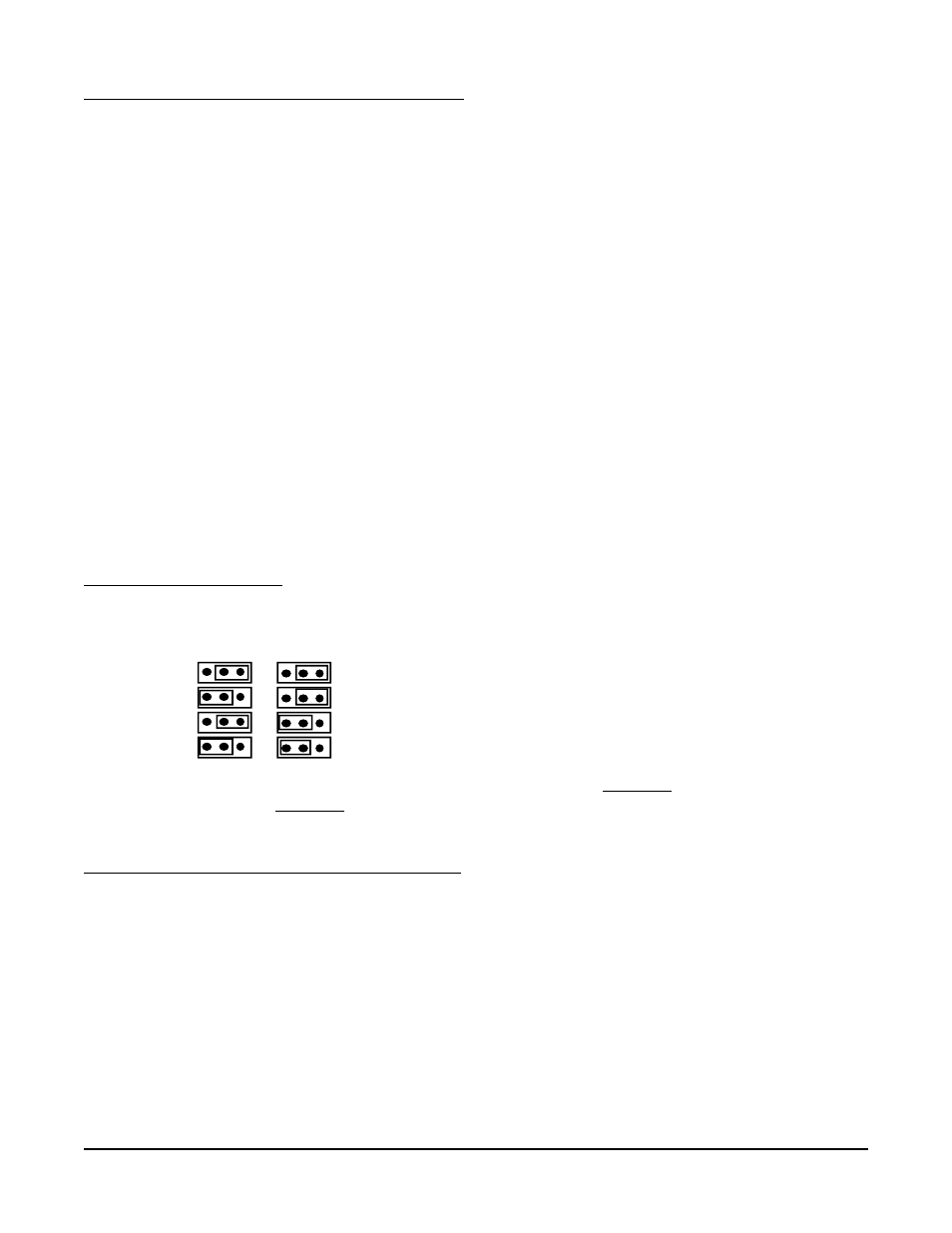
There are 2 additional jumpers per Input Board that are used for ID. These must be positioned as shown in Table
2-1 below as per their location inside the instrument. Board 1 is the bottom board.
TABLE 2-1 BOARD ID JUMPERS
If any board is removed from the instrument in a multiple stack of boards, it MUST BE installed in the correct
sequence or these jumpers MUST BE moved. If not installed correctly, calibration will be affected.
2.3.2 SENSOR BREAK and OUT-OF-RANGE DETECTION
Sensor break and out-of-range conditions are determined and handled by the software. When either occurs, the
software will drive the input value to +99999 or -99999 based upon whether SENSOR BREAK is software config-
ured for UPSCALE or DOWN SCALE in Input Configuration. Any outputs will react accordingly. Out-of-range is
defined as being more than 5% out of the span established by RANGE LIMIT LOW and RANGE LIMIT HIGH.
For 5 or 10 Volt and Current inputs, the analog signal goes to zero when there is a sensor break, due to voltage
divider or shunt resistors. For sensor break detection to work on these input types, the INPUT RANGE LOW
(analog signal low) and/or RANGE LIMIT LOW (engineering units low) parameters must be set high enough such
that at zero volts/mA, the resultant value will be at least 5% below the span established by RANGE LIMIT LOW
and RANGE LIMIT HIGH.
JU13
JU14
Board Position
Board 1
Board 2
Board 3
Board 4
Inputs
1, 3, 5, 7
Inputs
2, 4, 6, 8