A5.18 alarms, A5.18.1 block alarm (block_alm), A5.18.2 process alarms – Yokogawa EJX930A User Manual
Page 127: A5.19 example of block connections, A5-9
A5-9
IM 01C25T02-01E
NOTE: If a control block is connected as a cascade primary
block of the PID block in question, a mode transition of
the PID block to Cas occurs in the following sequence
due to initialization of the cascade connection: RCas or
ROut → Auto → Cas.
A5.18 Alarms
There are two kinds of alarms generated by a PID
block: block and process alarms.
A5.18.1 Block Alarm (BLOCK_ALM)
The block alarm BLOCK_ALM is generated upon
occurrence of either of the following errors (values
set in BLOCK_ERR) and notifies the content of
BLOCK_ERR.
Value of
BLOCK_ERR
Condition
Local Override
MODE_BLK actual of PID block is LO.
Input Failure
The status of PV is Bad. (The status
of IN is Bad, or the status of IN is
Uncertain and “Use Uncertain as Good”
is false in STATUS_OPTS.)
Out of Service
MODE_BLK.target of the PID block is
O/S.
A5.18.2 Process Alarms
There are six types of process alarms. Only one
process alarm can be generated at the same time,
and the process alarm having the highest priority
level from among those occurring at the same
time is generated. The priority level is set for each
process alarm type.
Process
Alarm
Cause of Occurrence
Parameter
Containing
Priority Level
Setting
HI_HI_ALM Occurs when the PV
increases above the
HI_HI_LIM value.
HI_HI_PRI
HI_ALM
Occurs when the PV
increases above HI_LIM
value.
HI_PRI
LO_ALM
Occurs when the PV
decreases below the
LO_LIM value.
LO_PRI
LO_LO_
ALM
Occurs when the PV
decreases below the
LO_LO_LIM value.
LO_LO_LIM
DV_HI_ALM Occurs when the value of
[PV - SP] increases above
the DV_HI_LIM value.
DV_HI_PRI
DV_LO_
ALM
Occurs when the value
of [PV - SP] decreases
below the DV_LO_LIM
value.
DV_LO_PRI
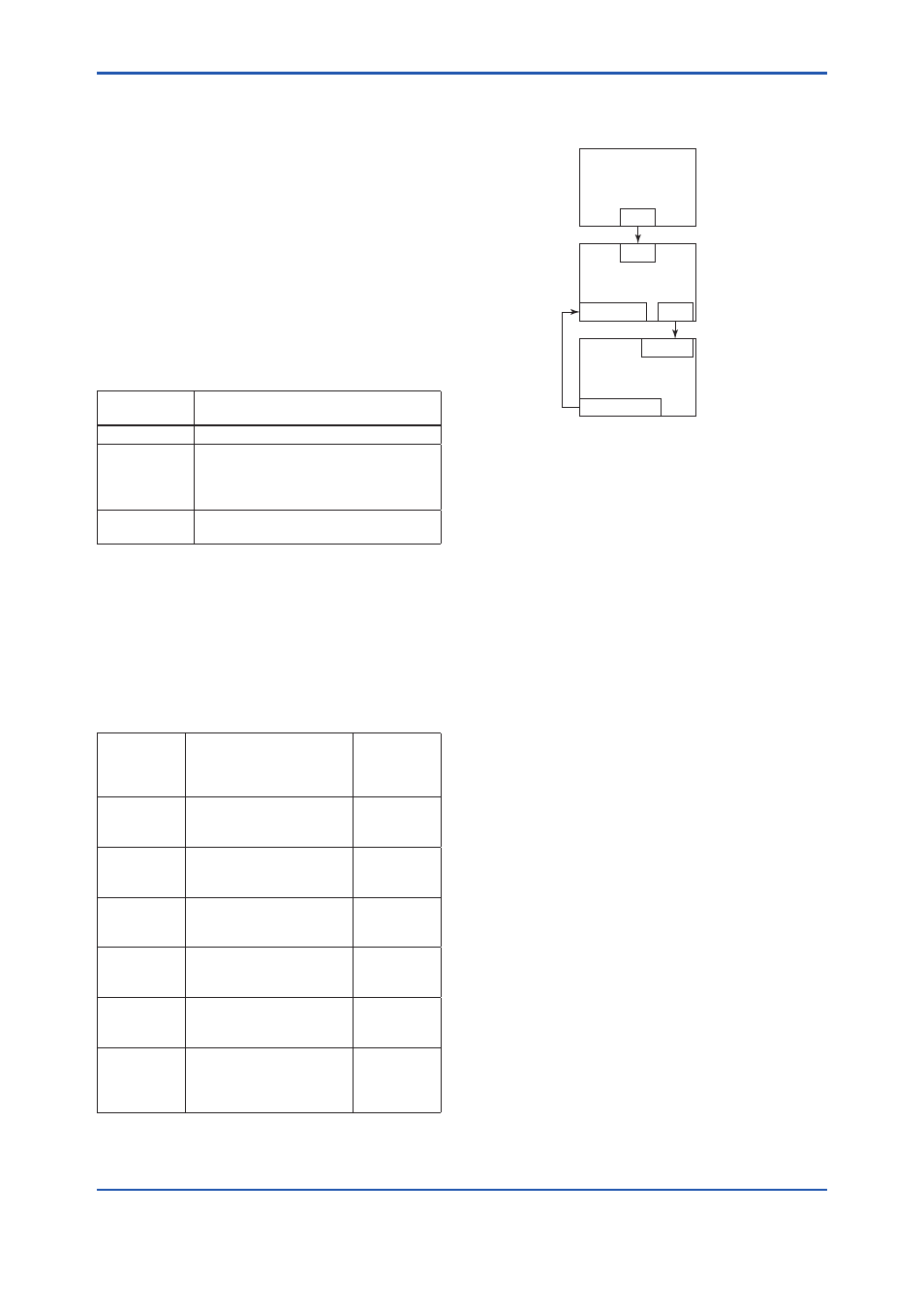
A5.19 Example of Block
Connections
PID
BKCAL_IN
OUT
IN
AO
BKCAL_OUT
CAS_IN
AI
OUT
FA0506.ai
When configuring a simple PID control loop by
combining an EJX transmitter with a fieldbus
valve positioner that contains an AO block, follow
the procedure below to make the settings of the
corresponding fieldbus function blocks:
1. Connect the AI block and PID block of the EJX,
and the AO block of the valve positioner as
shown above.
2. Set MODE_BLK.target of the PID block to
O/S, and then set GAIN, RESET, and RATE to
appropriate values.
3. Check that the value of MODE_BLK.actual of
the AI block is Auto.
4. Set MODE_BLK.target of the AO block to
CAS|AUTO (meaning "Cas and Auto").
5. Check that the value of BKCAL_IN.status of the
PID block is not Bad.
6. Check that the value of IN.status of the PID
block is not Bad.
7. Check that Auto is set in MODE_BLK.permitted
of the PID block.
8. Set MODE_BLK.target of the PID block to Auto.
When finishing all steps in order, the PID block and
AO block exchange the respective information and
initialize the cascade connection. Consequently,
the value of MODE_BLK.actual of the PID block
changes to Auto and automatic PID control starts.