2 operating mode, 1 preliminary information – EVCO EPD4DF3 Installer manual User Manual
Page 20
EVCO S.p.A.
EVDRIVE03 | User manual ver. 3.4 | Code 144EPDE344
page 20 of 70
The positioning speed depends on the operation mode:
-
during resynchronization is used the maximum speed, but towards the end of the positioning is made a
deceleration ramp
-
in debug mode is used the speed of the Debug step rate (parameter Prd0)
-
in manual mode and for all other positioning is used the maximum speed.
Using Limit valve opening (parameter Pr30) it is possible to adapt the valve to the application.
For example, for a valve with a maximum rating of 10 kW fitted to a machine with 7.5 kW, Pr30 would be set to 75%.
So, if the request position target is 90%, the final real position of the valve may be 67.5% = 90 x 75% of the
Maximum regulation steps.
The displayable variables for the current position and set-point in % are all referenced to the actual range of use of the
valve (0 - Pr30%), while the position in steps is the real position.
6.2
Operating mode
6.2.1
Preliminary information
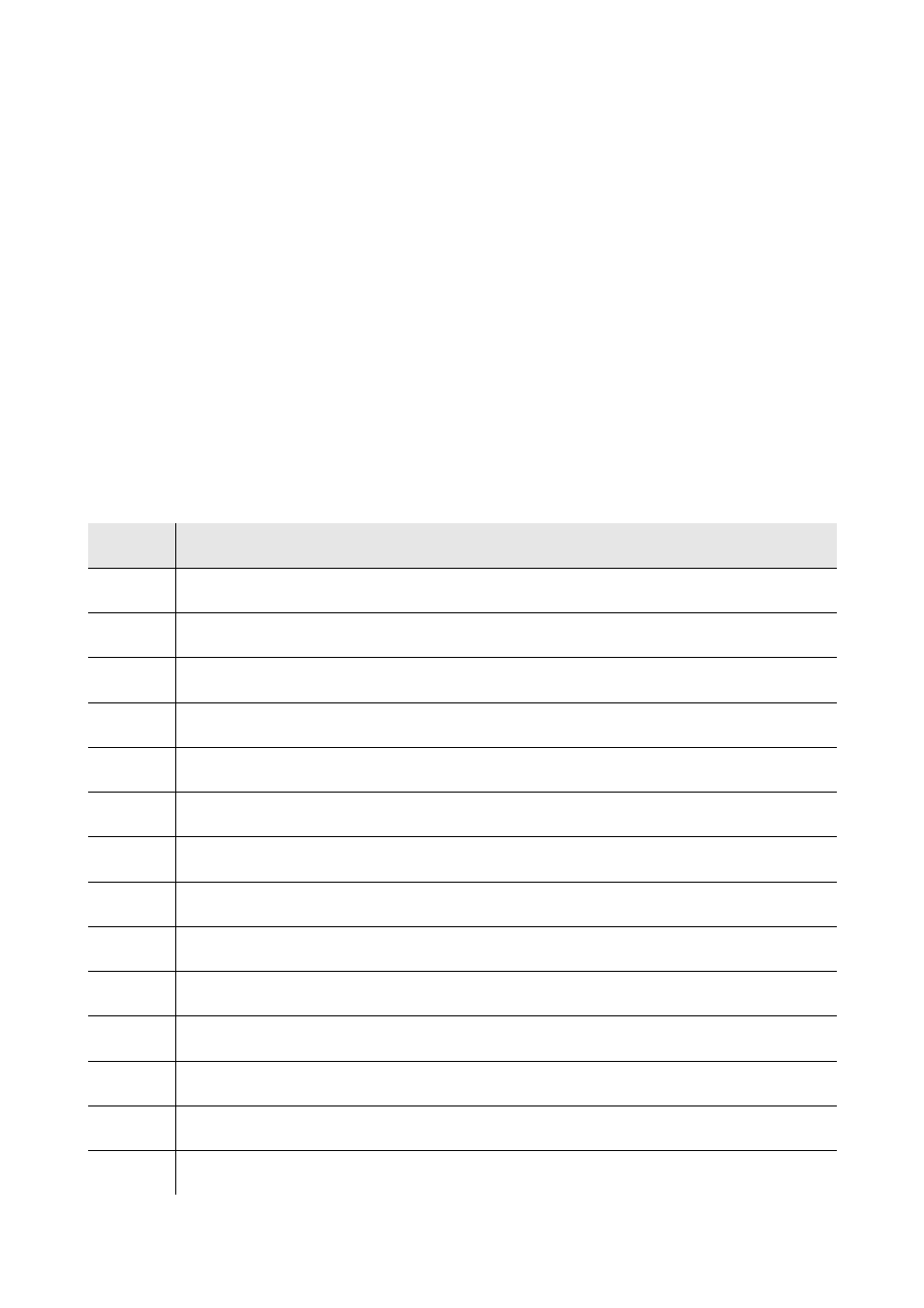
EVDRIVE03 implements a stepper motor control according to the state machine presented in the table here below
(hereinafter the document will make reference to these status).
The state in which the algorithm is in may be readable in the FSM status (Finite State Machine, parameter Stat).
FSM
Meaning
0 initialization
1 synchronization
wait
2 positioning
wait
3 probe
alarm
4 grid
alarm
5 communication
alarm
10 stand-by
off
11 stand-by
on
30 analog
positioner
40 stabilization
41 start-up
42 algorithm
selection
50 manual
51 debugger