Rockwell Automation 2098-IPD-020-DN Ultra5000 Series Intelligent Positioning Drives with DeviceNet Reference Manual User Manual
Page 68
Publication 2098-RM002A-EN-P – October 2001
4-44
Programming Reference
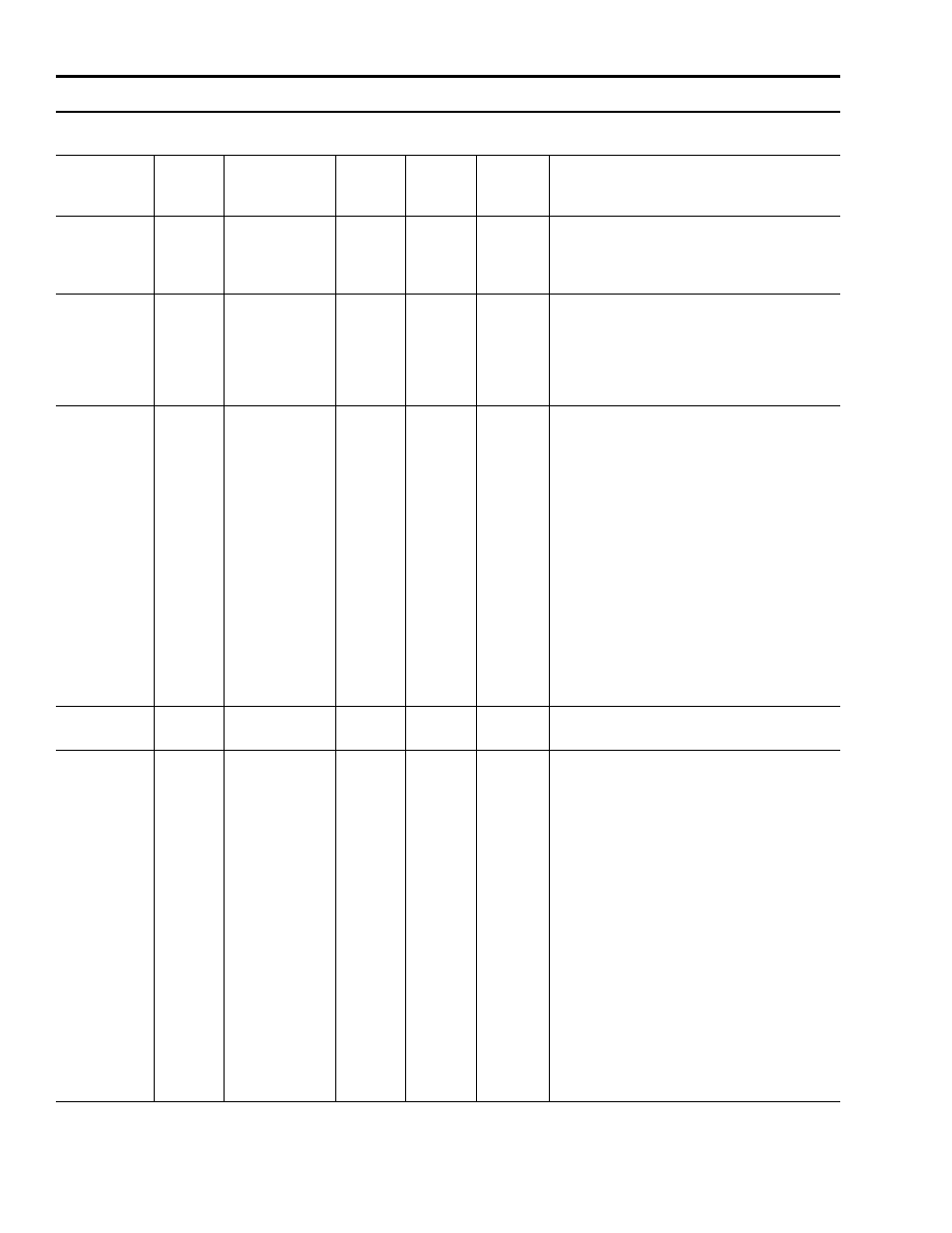
201
Set
Position
(Following) Error
Limit
DINT
4
cnts
The minimum position error that triggers the
Position (Following) Error fault
Range: 0 to 2147483647
Default: 8000
202
Set
Position
(Following) Error
Delay
REAL
4
msec
The minimum time during which the position error
must be greater than the Position (Following)
Error Limit to cause a Position (Following) Error
fault.
Range: 0 to 3.4e10
Default: 100
203
Get
Fault Status
DWORD
4
The Controller Fault Status provides the present
state of the possible fault conditions.
Bit 3 = Motor Overtemperature
Bit 4 = IPM Fault
Bit 8 = Bus Undervoltage
Bit 9 = Bus Overvoltage
Bit 10 = Bad (Illegal) Hall State
Bit 13 = Network Communication
Bit 16 = User Current
Bit 17 = Overspeed
Bit 18 = Position (Following) Error
Bit 19 = Motor Encoder Error
Bit 20 = Auxiliary Encoder Error
Bit 21 = Motor Filter
Bit 22 = IPM Filter
Bit 23 = Velocity Error
Bit 25 = User Velocity
204
Get
Fault Count
DINT
4
Displays the number of faults recorded since
power-up of the drive.
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
Get
Fault History 1
through
Fault History 20
USINT
1
Returns the most recent faults detected in the
drive. Fault History 1 is the most recent, Fault
History 20 is the oldest.
0 = No Fault
4 = Motor Overtemperature
5 = IPM Fault
9 = Bus Undervoltage
10 = Bus Overvoltage
11 = Bad (Illegal) Hall State
14 = Network Communication
17 = User Current
18 = Overspeed
19 = Position (Following) Error
20 = Motor Encoder Error
21 = Auxiliary Encoder Error
22 = Motor Filter
23 = IPM Filter
24 = Velocity Error
26 = User Velocity
58 = Excess CPU Load
Parameter Object,
Instances ID 1- 340
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data
Size
(Bytes)
Units /
Scale
Description