Position limit state – Rockwell Automation 2098-IPD-020-DN Ultra5000 Series Intelligent Positioning Drives with DeviceNet Reference Manual User Manual
Page 48
Publication 2098-RM002A-EN-P – October 2001
4-24
Programming Reference
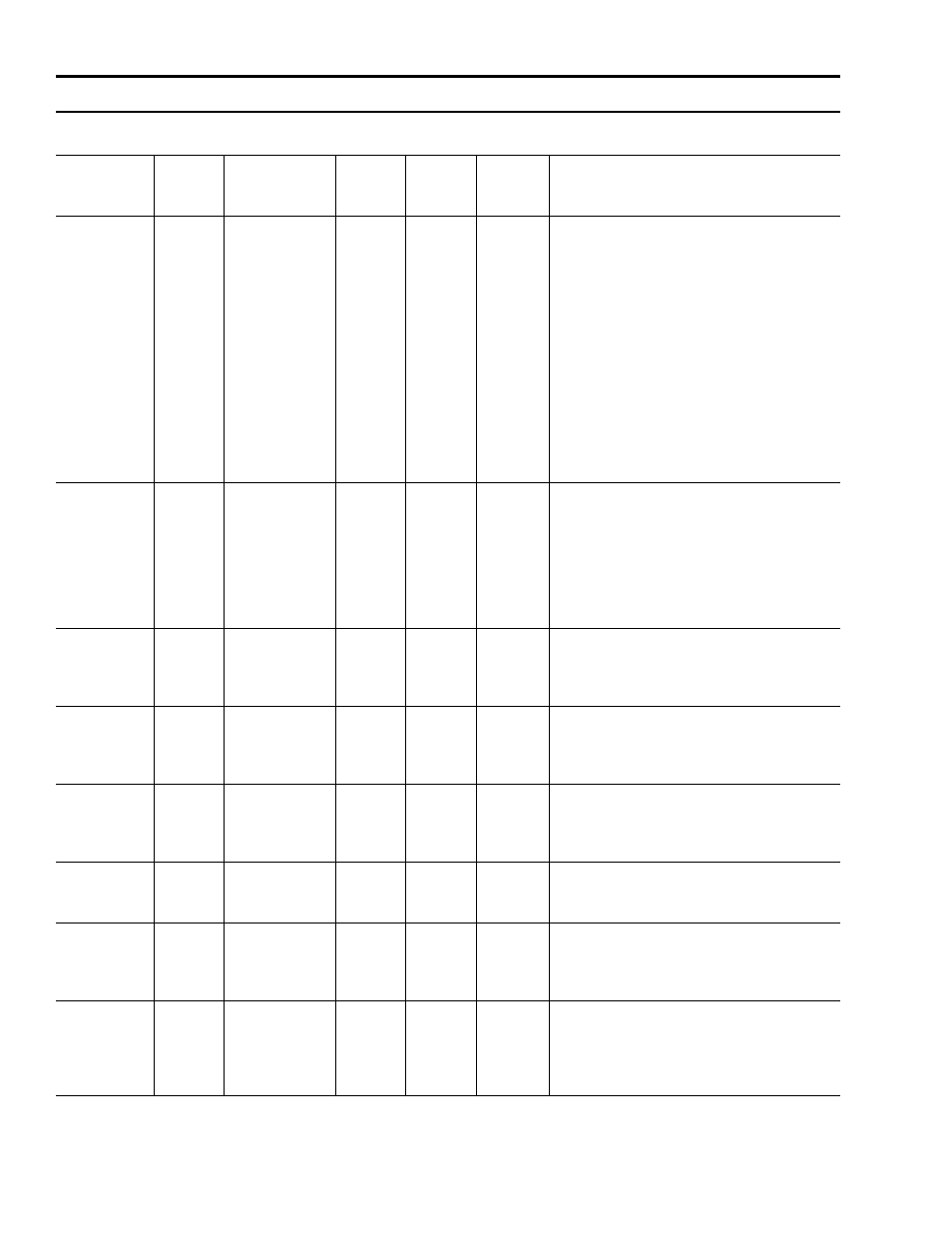
34
Get
Position Limit
State
USINT
1
State of the position limit function.
0 = Disabled – Position Limits are not being
monitored.
1 = Enabling – The drive is transitioning from the
Disabled state to Running.
2 = Running – The drive is monitoring position
limits.
3 = Stopping – The drive has detected a limit
violation and is decelerating the motor.
4 = Stopped – The motor has been stopped in
response to a limit violation. The drive will not
allow any commanded motion until the Position
Limits are reset.
5 = Resetting – The drive is transitioning from the
Stopped state to Running.
35
Get
Position Limit
Flags
DWORD
4
Indicates which position limit violation(s) have
been detected.
Bit 0 = Positive Soft Limit
Bit 4 = Positive Hard Limit
Bit 8 = Positive Motor Limit
Bit 16 = Negative Soft Limit
Bit 20 = Negative Hard Limit
Bit 24 = Position Motor Limit
36
Set
Jog Forward
Command
USINT
1
Spins the motor at the Jog Program Velocity -
Parameter 40 in the forward direction.
0 = No Action (default)
1 = Execute Command
37
Set
Jog Reverse
Command
USINT
1
Spins the motor at the Jog Program Velocity -
Parameter 40 in the reverse direction.
0 = No Action (default)
1 = Execute Command
38
Set
Jog Stop
Command
USINT
1
Brings the motor to a stop, using the Jog Program
0 = No Action (default)
1 = Execute Command
39
Set
Jog Abort
Command
USINT
1
Brings the motor to an immediate stop.
0 = No Action (default)
1 = Execute Command
40
Set
Jog Program
Velocity
REAL
4
cnts/ sec
The commanded motor velocity when the drive is
jogging. Not saved in non-volatile memory.
Range: -3.4e10 to 3.4e10
Default: 0
41
Set
Jog Program
Accel
REAL
4
cnts/
sec
2
The acceleration rate used when ramping-up to
the Jog Program Velocity. Not saved in
non-volatile memory.
Range: 0 to 3.4e10
Default: 0
Parameter Object,
Instances ID 1- 340
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data
Size
(Bytes)
Units /
Scale
Description