Rockwell Automation 2098-IPD-020-DN Ultra5000 Series Intelligent Positioning Drives with DeviceNet Reference Manual User Manual
Page 58
Publication 2098-RM002A-EN-P – October 2001
4-34
Programming Reference
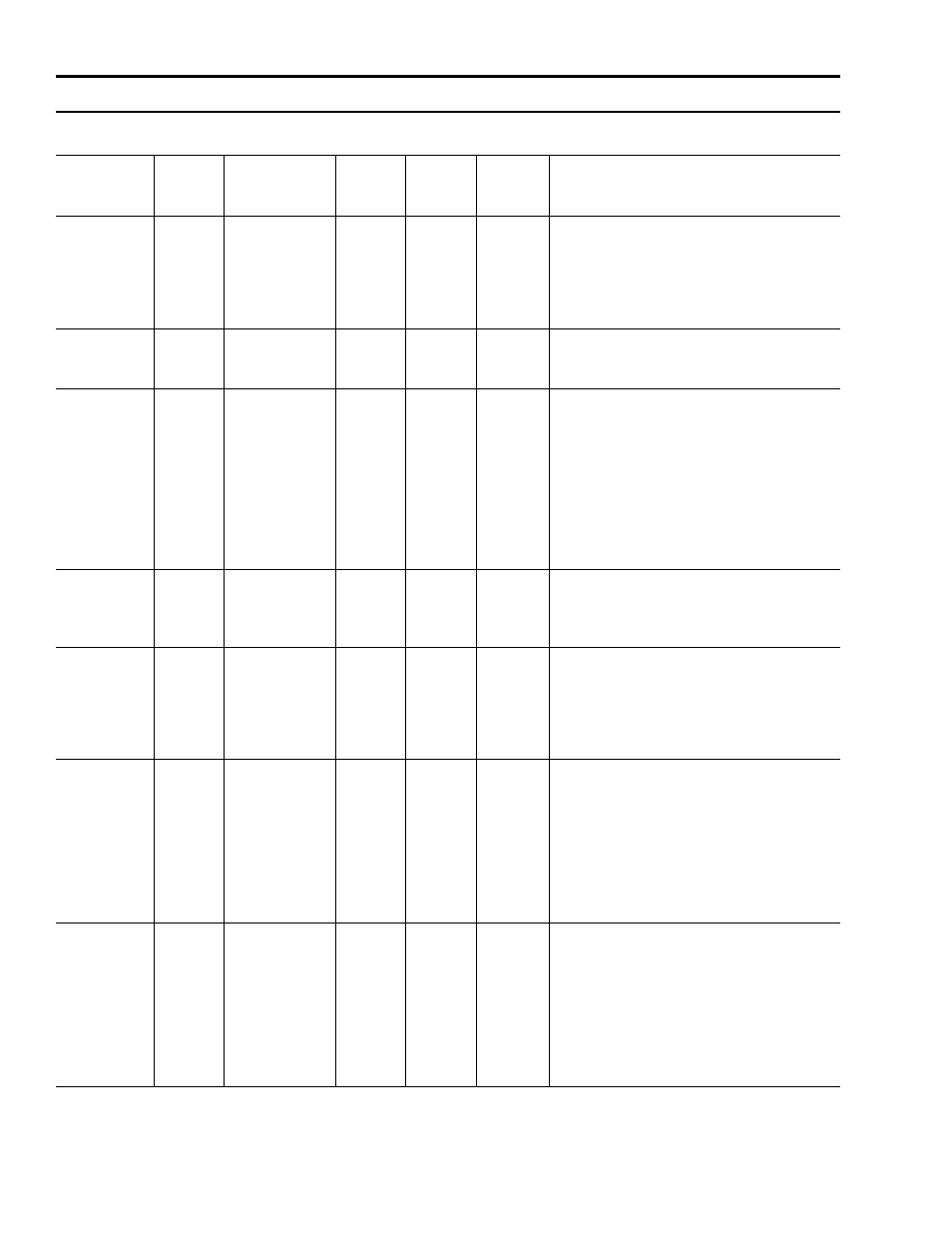
129
Set
Start Preg Tune
USINT
1
Drives the motor with a square (or step) wave, the
shape of which is determined by the commanded
Preg Tune Step, Preg Tune Period, and the
0 = No Action (default)
1 = Execute Command
130
Set
Stop Preg Tune
USINT
1
Stops position tuning.
0 = No Action (default)
1 = Execute Command
131
Set
Preg Tune
Direction
USINT
1
Selects a tuning direction. Not saved in
non-volatile memory.
0 = Bi-Directional (default) - to tune the drive
using an alternating step-input to create
alternately forward and reverse directional
motion.
1 = Forward Only - to tune the drive using a
step-input to create forward motion only.
2 = Reverse Only - Only to tune the drive using a
step-input to create reverse motion only.
132
Set
Preg Tune Period REAL
4
sec
The time the drive will hold its present step
position. Not saved in non-volatile memory.
Range: 0 to 3.4e10
Default: 0
133
Set
Preg Tune Step
DINT
4
cnts
The number of counts the drive will move in a
single direction. In Bi-Directional tuning, the
direction will alternate. Not saved in non-volatile
memory.
Range: 0 to 2147483647
Default: 0
134
Get
Preg Tune
Command
DINT
4
cnts
The position command driving the position
regulator while the position tuning algorithm is
running. If the Preg Tune Direction is set to c or
Reverse Only, this signal is adjusted after each
period of the tuning signal to remove the offset
that is accumulating in the position of the motor.
This allows the uni-directional signal to be
displayed in Ultraware's oscilloscope without
having to constantly adjust the offset.
135
Get
Preg Tune
Feedback
DINT
4
cnts
The position feedback to the position regulator
while the position tuning algorithm is running. If
the Preg Tune Direction is set to Forward Only or
Reverse Only, this signal is adjusted after each
period of the tuning signal to remove the offset
that is accumulating in the position of the motor.
This allows the uni-directional signal to be
displayed in Ultraware's oscilloscope without
having to constantly adjust the offset.
Parameter Object,
Instances ID 1- 340
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data
Size
(Bytes)
Units /
Scale
Description