Rockwell Automation 2098-IPD-020-DN Ultra5000 Series Intelligent Positioning Drives with DeviceNet Reference Manual User Manual
Page 45
Publication 2098-RM002A-EN-P – October 2001
Programming Reference
4-21
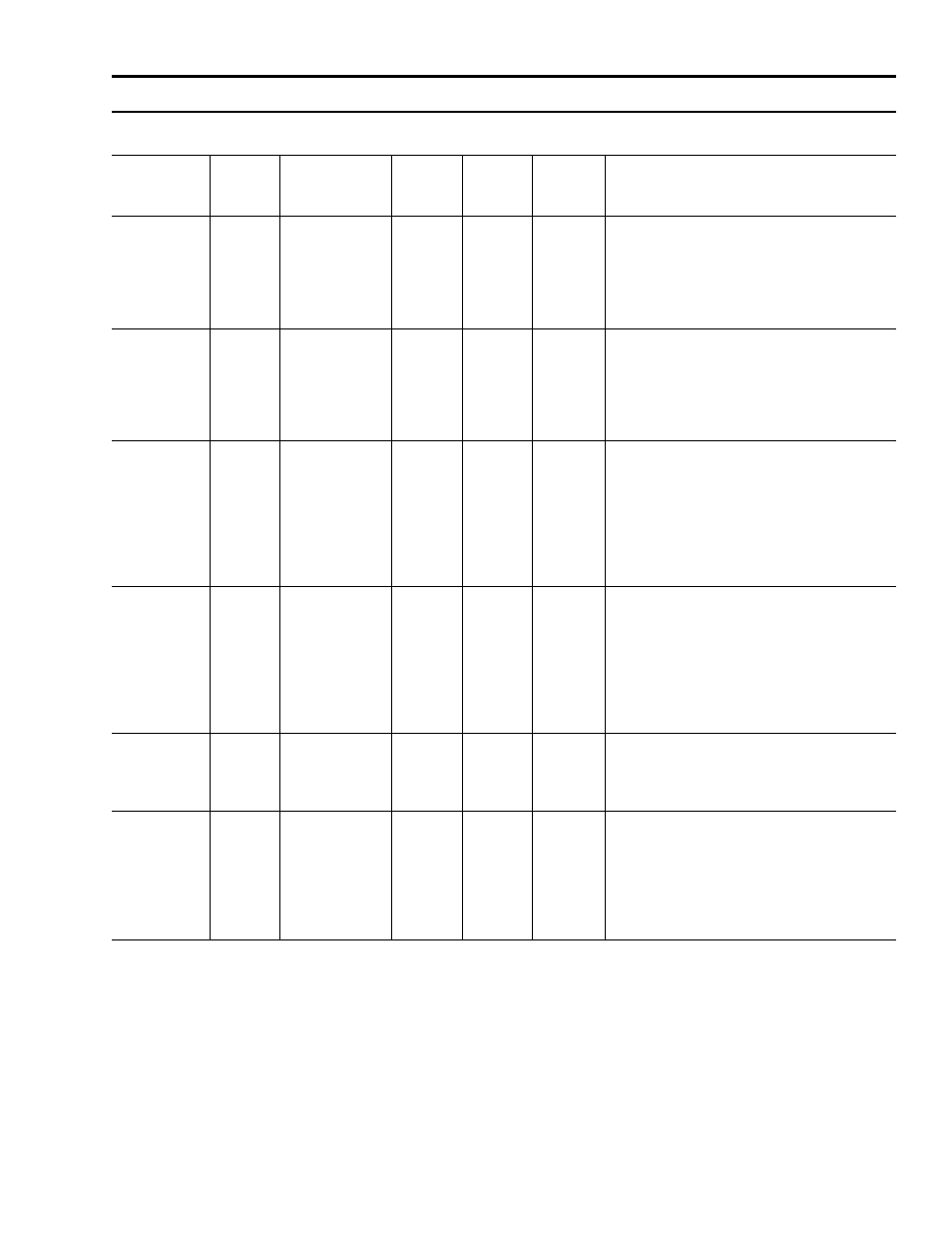
22
Set
Enable Position
Limit
USINT
1
Enables the position limits. This causes the drive
to start monitoring the position limits. The
Position Limit State - Parameter 34 will transition
to “Running”.
0 = No Action (default)
1 = Execute Command
23
Set
Disable Position
Limit
USINT
1
Disables the position limits. This causes the drive
to stop monitoring the position limits. The
Position Limit State - Parameter 34 will transition
to “Disabled”.
0 = No Action (default)
1 = Execute Command
24
Set
Reset Position
Limit
USINT
1
After a position limit violation, the position limits
will go to the “Stopped” state. The drive will not
allow commanded motion in this state. Pressing
this button will allow the drive to respond to
commanded motion to back off of the limit
condition.
0 = No Action (default)
1 = Execute Command
25
Set
Position Limit
Decel
REAL
4
cnts/ sec
2
When a limit is detected, the drive will use this
deceleration rate to bring the axis to a stop,
unless doing so would violate the Position Limit
Distance - Parameter 26. If necessary to stay
within the Position Limit Distance, the drive will
calculate a greater deceleration rate.
Range: 0 to 3.4e10
Default: 0
26
Set
Position Limit
Distance
DINT
4
cnts
When a limit is detected, the drive will bring the
axis to a stop within this distance.
Range: 0 to 2147483647
Default: 0
27
Set
Position Soft
Limits
USINT
1
Enables or disables detection of soft limit
violations. The Position Limits (see Enable
Position Limit - Parameter 22) must also be
enabled for soft limit violations to be detected.
Not saved in non-volatile memory.
0 = Disable (default)
1 = Enable
Parameter Object,
Instances ID 1- 340
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data
Size
(Bytes)
Units /
Scale
Description