Rockwell Automation 2098-IPD-020-DN Ultra5000 Series Intelligent Positioning Drives with DeviceNet Reference Manual User Manual
Page 61
Publication 2098-RM002A-EN-P – October 2001
Programming Reference
4-37
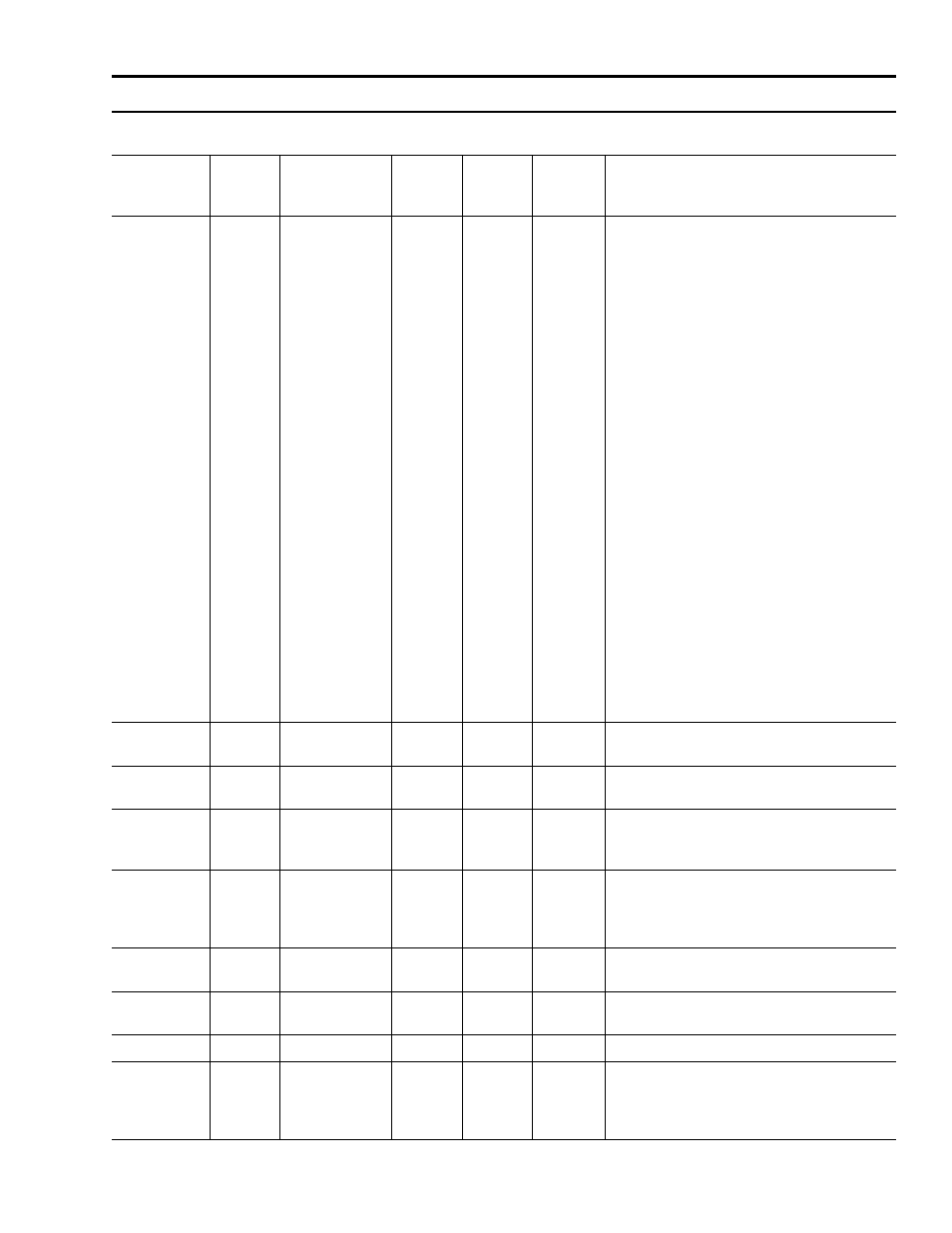
142
Set
Ratchet Positive
Mode
BYTE
1
Bit 0 = Ignore Positive Input - Positive direction
master encoder input will generate NO motor
movement.
Bit 1 = Negate Positive Input - Master encoder
input in a positive direction will generate motor
movement in a negative direction.
Note: Selecting "Ignore Positive Input", above,
overrides this selection.
Bit 2 = Buffer Positive Input - Positive direction
master encoder input is accumulated in a buffer
without generating motor movement.
Note: This selection will often be used together
with "Unbuffer Negative Input", above.
Bit 3 = Unbuffer Positive Input - Positive direction
master encoder input will be used first to reduce
the accumulated negative directional buffer then,
only after this buffer is reduced to zero, will
generate motor movement in the positive
direction.
Note: This assumes "Buffer Positive Input",
above, is not selected
Default = 0.
143
Get
Motor Encoder
Output
DINT
4
cnts
The motor encoder's output.
144
Get
Master Encoder
Output
DINT
4
cnts
The master encoder's output.
145
Get
Ratchet State
USINT
1
Provides the state of the ratchet.
0 = Disable
1 = Enable
146
Get
Ratchet Buffer
DINT
4
cnts
The accumulated value stored in the buffer when
negative or positive input is set to buffer and/or
unbuffer. This value is automatically re-set to zero
at drive power up.
147
Get
Ratchet Output
DINT
4
cnts
The position generated by the ratchet. This value
is automatically re-set to zero at drive power up.
148
Get
Ratchet Position
DINT
4
cnts
The position generated by the ratchet. This value
is automatically reset to zero at power up.
149
Get
Ratchet Velocity
REAL
4
cnts/ sec
The velocity command generated by the ratchet.
150
Get
Input 1 State
USINT
1
The current state, or condition, of the digital
input.
0 = Off
1 = On
Parameter Object,
Instances ID 1- 340
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data
Size
(Bytes)
Units /
Scale
Description