Rockwell Automation 2098-IPD-020-DN Ultra5000 Series Intelligent Positioning Drives with DeviceNet Reference Manual User Manual
Page 57
Publication 2098-RM002A-EN-P – October 2001
Programming Reference
4-33
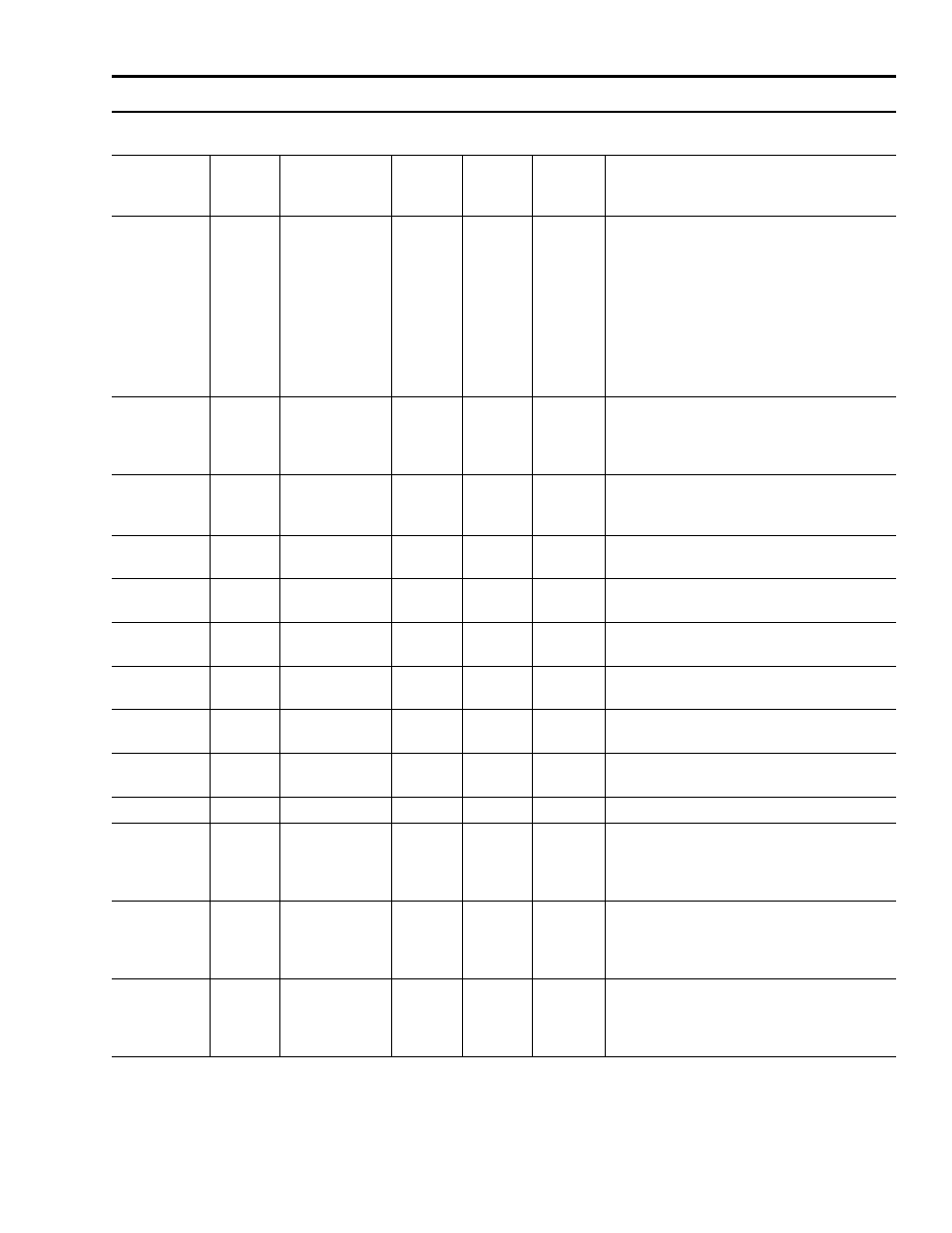
116
Set
Preg Ki
REAL
4
1/sec
Integral gain for the position loop. Ki gain
improves the steady-state positioning
performance of the system and virtually
eliminates steady-state positioning errors.
Increasing the integral gain generally increases
the ultimate positioning accuracy of the system.
However excessive integral gain results in system
instability.
Range: 0 to 3.4e10
Default: 0
117
Set
Preg Ki Zone
DINT
4
cnts
Enter the region, in counts, around Preg
Command Position where integral gain is active.
Range: 0 to 2147483647
Default: 0
118
Set
Preg Kff
REAL
4
Velocity feedforward gain for the position loop.
Range: 0 to 3.4e10
Default: 1
119
Get
Preg Command
Position
DINT
4
cnts
The command position input to the position loop.
120
Get
Preg Command
Velocity
REAL
4
cnts/ sec
The command velocity input to the position loop.
121
Get
Preg Command
Accel
REAL
4
cnts/ sec
2
The command acceleration input to the position
loop.
122
Get
Preg Feedback
Position
DINT
4
cnts
The feedback position returned from the motor to
the position loop.
123
Get
Preg Error
DINT
4
cnts
The difference between Preg Command Position
124
Get
Preg Error Sum
DINT
4
cnts
The position error summation used by integral
gain.
125
Get
Preg Output
REAL
4
cnts/ sec
The generated output from the position loop.
126
Get
Preg Tune State
USINT
1
Indicates the state of the position tuning function.
0 = Idle
1 = Running
2 = Stopping
127
Get
Preg Command
Offset
DINT
4
cnts
Offsets the Command Position value displayed on
Ultraware's Oscilloscope to prevent the command
trace from incrementing ('walking') off the
display.
128
Get
Preg Feedback
Offset
DINT
4
cnts
Offsets the Feedback Position value displayed on
the Ultraware's Oscilloscope to prevent the
feedback trace from incrementing ('walking') off
the display.
Parameter Object,
Instances ID 1- 340
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data
Size
(Bytes)
Units /
Scale
Description