Rockwell Automation 2098-IPD-020-DN Ultra5000 Series Intelligent Positioning Drives with DeviceNet Reference Manual User Manual
Page 55
Publication 2098-RM002A-EN-P – October 2001
Programming Reference
4-31
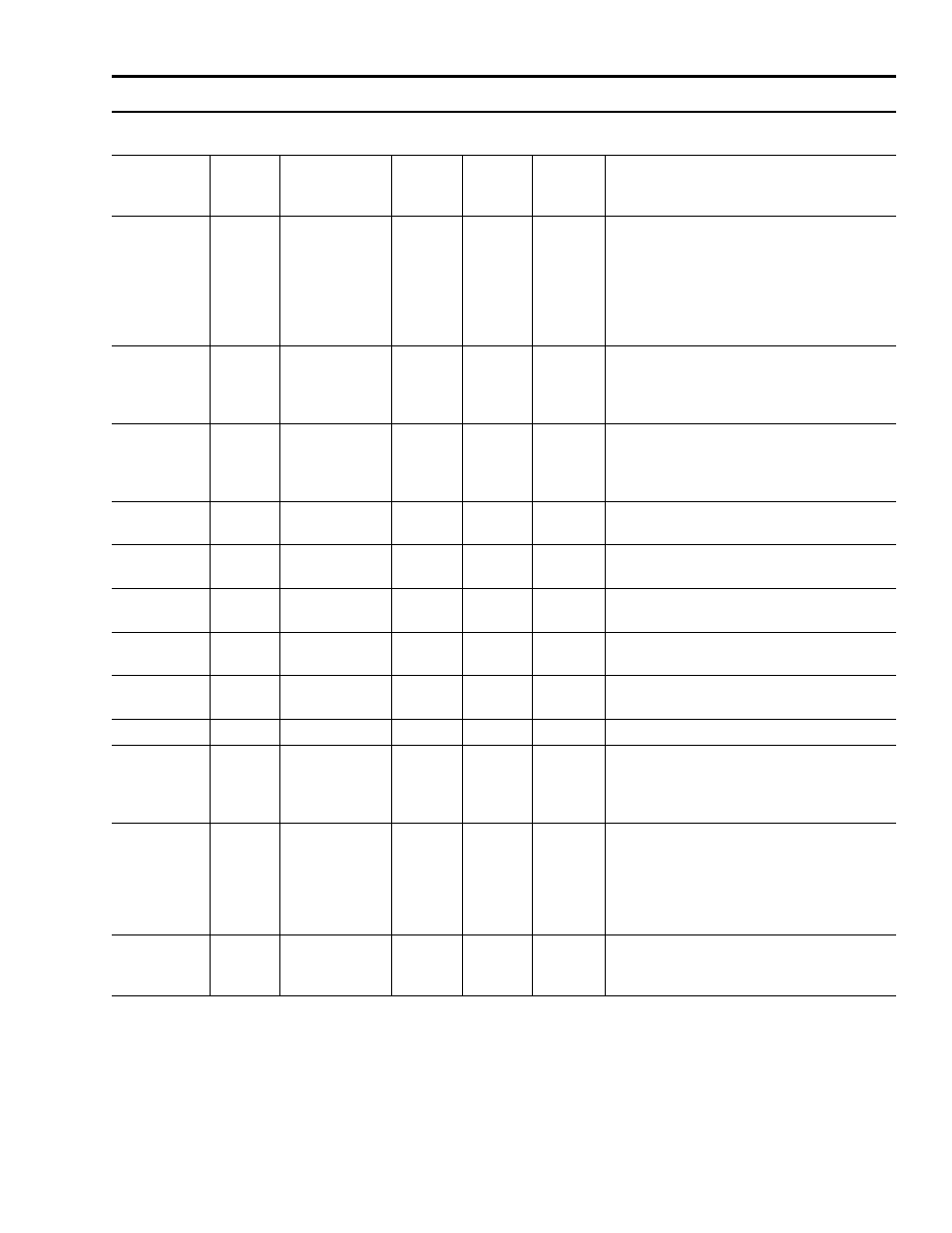
96
Set
Vreg Bandwidth
REAL
4
Hertz
Lowpass output filter bandwidth. Valid values
range from 0 Hz to 2000 Hz. Bandwidth reduces
noise generated by encoder resolution or
mechanical resonance in the system. Setting to
zero disables filtering
Range: 0 to 2000
Default: 0
97
Set
Vreg Upper Limit REAL
4
Amps
The maximum positive current the drive may
output to the motor.
Range: 0 to 3.4e10
Default: 30
98
Set
Vreg Lower Limit REAL
4
Amps
The maximum negative current the drive may
output to the motor.
Range: -3.4e10 to 0
Default: -30
99
Get
Vreg Command
Velocity
REAL
4
cnts/ sec
The command velocity input to the velocity loop.
100
Get
Vreg Command
Accel
REAL
4
cnts/ sec
2
The command acceleration input to the velocity
loop.
101
Get
Vreg Feedback
Velocity
REAL
4
cnts/ sec
The feedback velocity returned from the motor to
the velocity loop.
102
Get
Vreg Error
REAL
4
cnts/ sec
The difference between Command Velocity and
Feedback Velocity.
103
Get
Vreg Error Sum
REAL
4
cnts/ sec
The velocity error summation used by integral
gain.
104
Get
Vreg Output
REAL
4
Amps
The generated output from the velocity loop.
105
Get
Vreg Tune State
USINT
1
Indicates the state of the velocity tuning function.
0 = Idle
1 = Running
2 = Stopping
106
Set
Start Vreg Tune
USINT
1
Drives the motor with a square (or step) wave, the
shape of which is determined by the commanded
Vreg Tune Step, Vreg Tune Period, and Vreg Tune
Direction.
0 = No Action (default)
1 = Execute Command
107
Set
Stop Vreg Tune
USINT
1
Stops velocity tuning.
0 = No Action (default)
1 = Execute Command
Parameter Object,
Instances ID 1- 340
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data
Size
(Bytes)
Units /
Scale
Description