Rockwell Automation 2098-IPD-020-DN Ultra5000 Series Intelligent Positioning Drives with DeviceNet Reference Manual User Manual
Page 59
Publication 2098-RM002A-EN-P – October 2001
Programming Reference
4-35
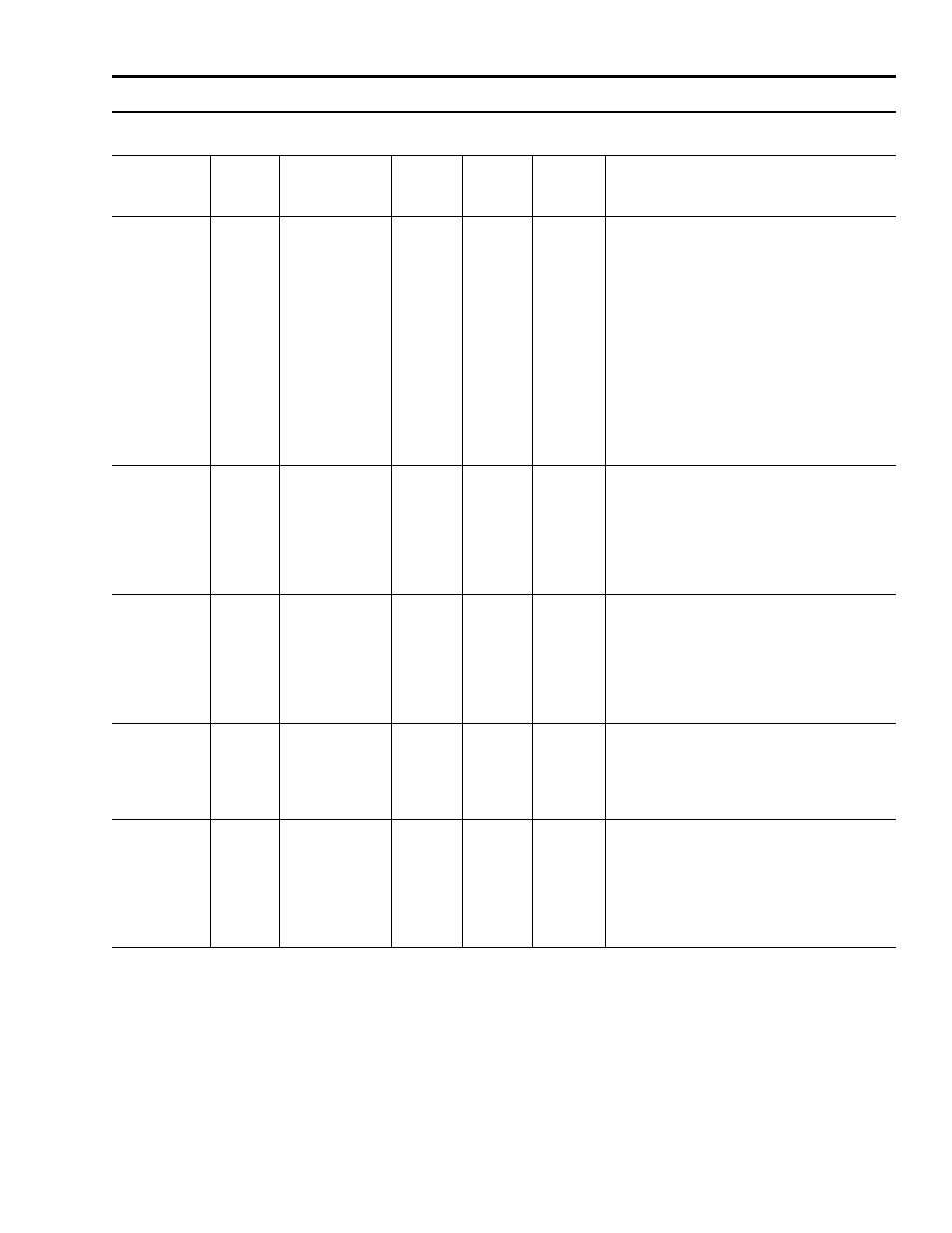
136
Set
Motor Encoder
Interpolation
UINT
2
The amount of interpolation to be used with sine/
cosine encoders. For example, if the interpolation
is set to x256, the drive will interpolate 256
counts for every 1/4 line of the input sinusoid.
Valid values are:
4 = x4 (default)
8 = x8
16 = x16
32 = x32
64 = x64
128 = x128
256 = x256
512 = x512
1024 = x1024
137
Set
Motor Encoder
Polarity
USINT
1
Select the motor encoder's polarity.
0 = Positive (default) - Turning the motor in a
clockwise direction (as viewed from the shaft
end) increases the feedback position (in counts).
1 = Negative - turning the motor in a clockwise
direction (as viewed from the shaft end)
decreases the feedback position (in counts).
138
Set
Motor Encoder
Filter
USINT
1
Select the state of the motor encoder filer. The
filter reduces the upper limit of the rate at which
feedback pulses will be recognized. You may
need to enable feedback in a noisy environment,
or when a long encoder cable is used.
0 = Disable (default)
1 = Enable
139
Set
Master Encoder
Polarity
USINT
1
Select the master encoder's polarity.
0 = Positive (default) - Turning the motor in a
clockwise direction (as viewed from the shaft
end) increases the feedback position (in counts).
1 = Negative
140
Set
Master Encoder
Filter
USINT
1
Select the state of the master encoder filter. The
filter reduces the upper limit of the rate at which
feedback pulses will be recognized. You may
need to enable feedback in a noisy environment,
or when a long encoder cable is used.
0 = Disable (default)
1 = Enable
Parameter Object,
Instances ID 1- 340
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data
Size
(Bytes)
Units /
Scale
Description