13 setting softmotion parameters, Setting softmotion parameters ( 92), 7commissioning of the system – Lenze EtherCAT Controller-based Automation User Manual
Page 92
7
Commissioning of the system
7.3
Detailed description of the commissioning steps
92
Lenze · Controller-based Automation · EtherCAT® Communication Manual · DMS 6.4 EN · 04/2014 · TD17
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.3.13
Setting SoftMotion parameters
In the case of the Servo-Inverter i700, all the parameters needed for operation are stipulated by
means of the Lenze controller (settings via the »PLC Designer«).
Commissioning the i700 servo inverter
In the case of the Servo Drive 9400 Highline CiA402 in contrast, the following parameters must be
set manually via »Engineer«:
• Homing mode (C02640, set in application-dependent manner)
• Touch probe interface (set in application-dependent manner)
• Control of the holding brake (0x60FB/2 | Brake control)
Depending on the setting of this parameter, the holding brake is applied for a short time after
the conclusion of the home position path. In order to avoid this, set bit 2 in this parameter
("disable stop": does not apply the brake at standstill).
These parameters are not set via the Lenze Controller.
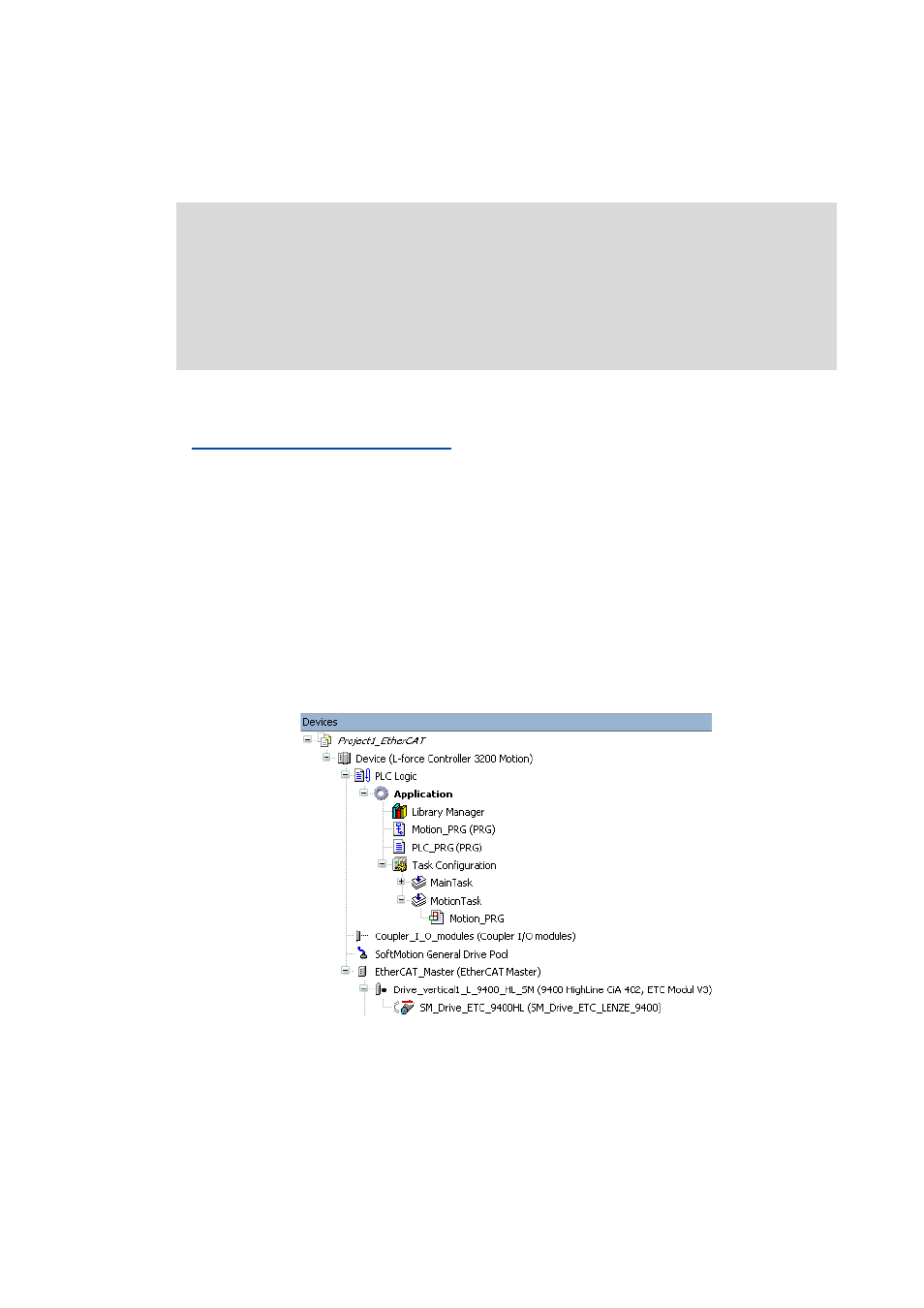
Example of a minimum configuration with a Motion device (Servo Drive 9400 HighLine CiA 402)
Note!
In »PLC Designer«, the SoftMotion tabs are only available in the case of field devices that
use a Motion application.
• i700 servo inverter
• Servo Drive 9400 Highline CiA402
The SoftMotion parameters are to be set in relation to the application.