6 synchronisation with "distributed clocks" (dc), Synchronisation with "distributed clocks" (dc), 6synchronisation with "distributed clocks" (dc) – Lenze EtherCAT Controller-based Automation User Manual
Page 36
6
Synchronisation with "Distributed clocks" (DC)
36
Lenze · Controller-based Automation · EtherCAT® Communication Manual · DMS 6.4 EN · 04/2014 · TD17
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
6
Synchronisation with "Distributed clocks" (DC)
The "Distributed clocks" (DC) functionality enables exact time synchronisation for applications in
which several axes perform a coordinated movement simultaneously. Data are incorporated
synchronously with the PLC program. During DC synchronisation, all slaves are synchronised with a
reference clock, the so-called "DC master".
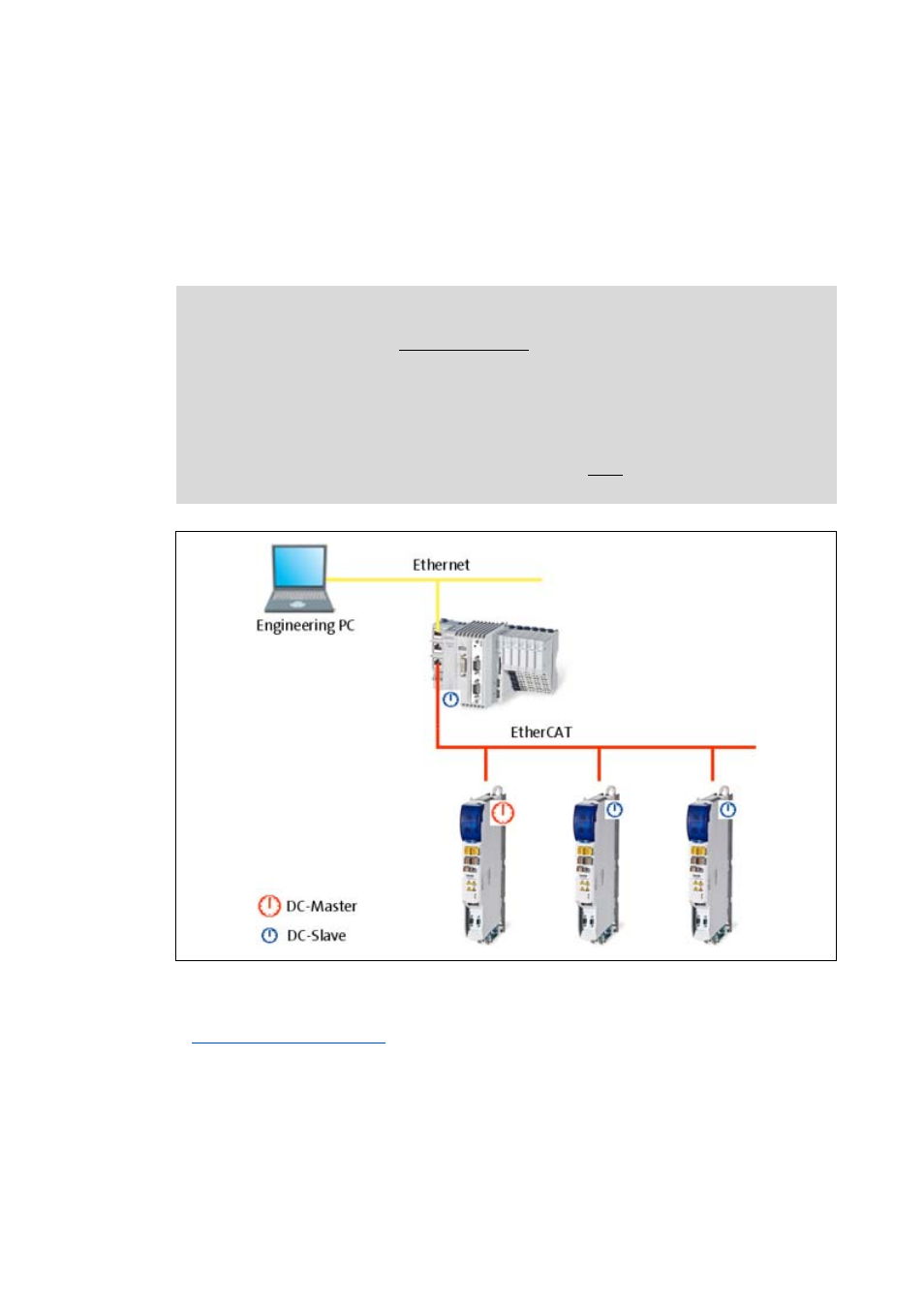
[6-1]
Example: EtherCAT bus system with 3231 C controller and i700 servo inverter
The settings for the DC synchronisation are made with the »PLC Designer«.
Note!
• DC synchronisation is absolutely required for Motion applications.
• DC synchronisation can also be used for Logic applications.
• Not all slaves support the DC functionality.
• In order to be able to use the DC functionality, the first slave connected to the
EtherCAT master (Lenze Controller) must have DC master capability. The other slaves
can be connected in a mixed arrangement, either DC capable or non-DC-capable.
• The first EtherCAT slave after the Lenze Controller must be the DC master that
supplies the other EtherCAT nodes (incl. controller) with the exact time.