4 overview of the commissioning steps, Overview of the commissioning steps, 7commissioning of the system – Lenze EtherCAT Controller-based Automation User Manual
Page 52
7
Commissioning of the system
7.3
Detailed description of the commissioning steps
52
Lenze · Controller-based Automation · EtherCAT® Communication Manual · DMS 6.4 EN · 04/2014 · TD17
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.3.4.4
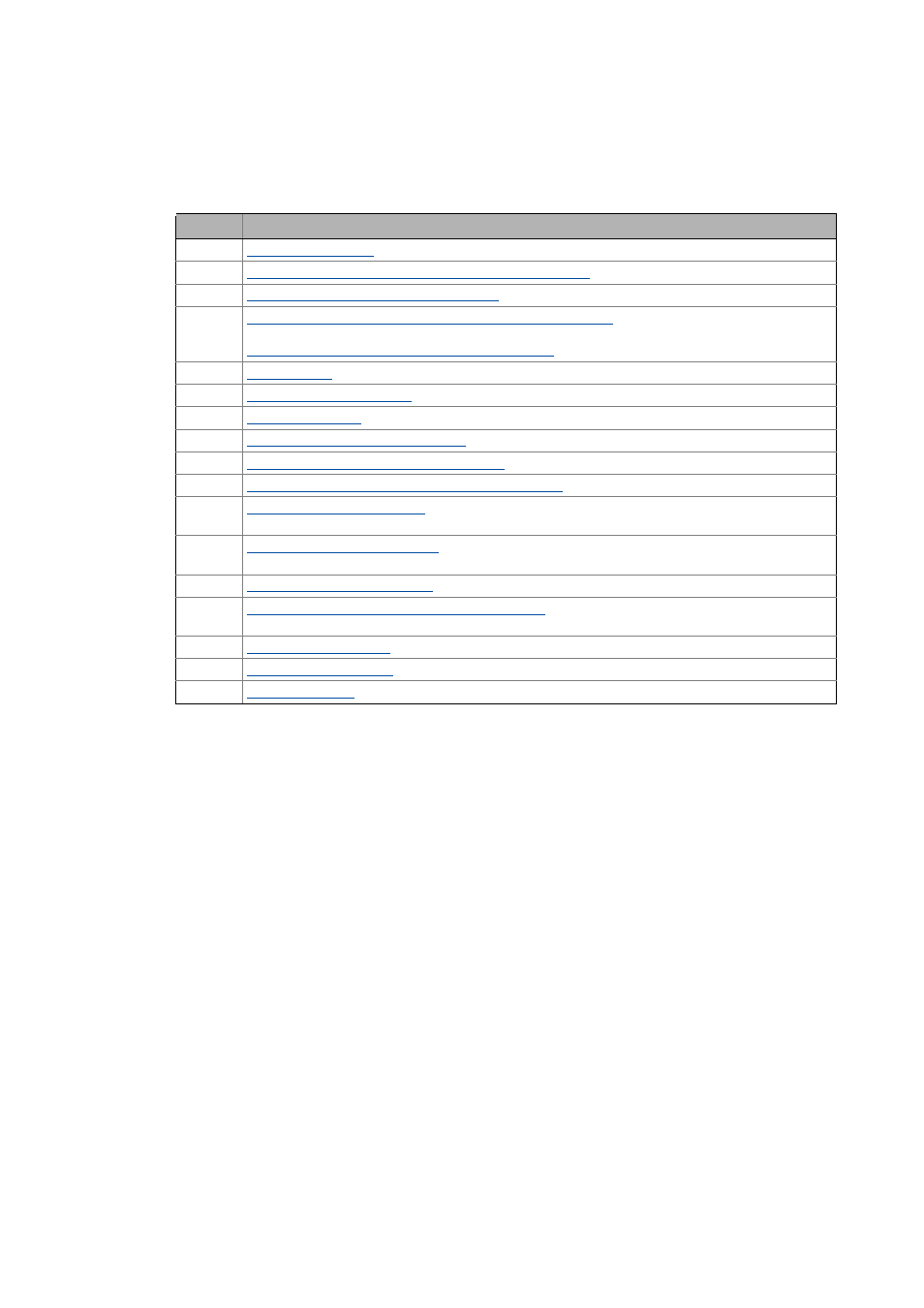
Overview of the commissioning steps
The main commissioning steps are listed in the following table:
Step
Activity
1.
Create a project folder ( 43)
2.
Creating a PLC program with a target system (Logic/Motion) ( 71)
3.
Configuring the communication parameters ( 73)
4.
Determining the physical EtherCAT configuration (fieldbus scan) ( 75)
or
Creating a control configuration (adding field devices) ( 79)
5.
6.
Setting a DC synchronisation ( 87)
7.
8.
Entering motor and controller settings ( 54)
9.
Setting the feedback system for servo control ( 57)
10.
Integrating the L_SMC_AxisBasicControl function block ( 59)
11.
Setting SoftMotion parameters ( 92)
Only required for drives with Motion functionality.
12.
Processing EtherCAT I/O mapping ( 95)
Only required for drives that solely have the master functionality (logic bus).
13.
Compiling the PLC program code ( 103)
14.
Logging in on the controller with the »PLC Designer« ( 103)
With the log-in, the fieldbus configuration and the PLC program are loaded into the Controller.
15.
Starting the PLC program ( 103)
16.
Executing manual control ( 65)
17.