1 the ethercat state machine, The ethercat state machine, 4the lenze automation system with ethercat – Lenze EtherCAT Controller-based Automation User Manual
Page 20
4
The Lenze automation system with EtherCAT
4.1
Brief description of EtherCAT
20
Lenze · Controller-based Automation · EtherCAT® Communication Manual · DMS 6.4 EN · 04/2014 · TD17
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.1.2.1
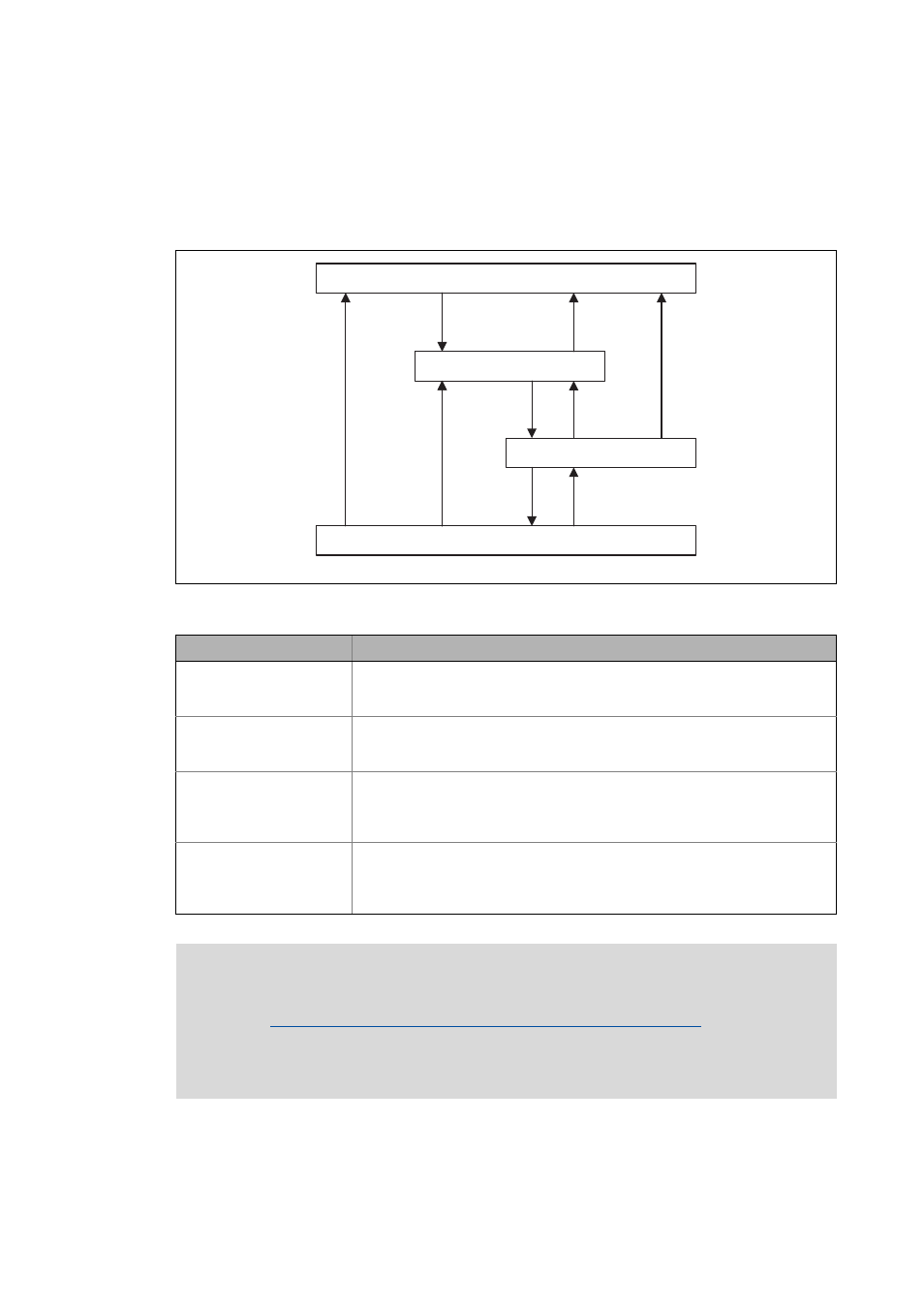
The EtherCAT state machine
Before communication via EtherCAT is possible, the fieldbus is scanned by the EtherCAT state
machine when the installation is being powered up. The following illustration shows the possible
status changes from the point of view of an EtherCAT slave.
[4-2]
EtherCAT state machine
E94AYCET009
Operational
Pre-Operational
Init
Safe-Operational
State
Description
Init
• Initialisation phase
• No SDO/PDO communication with the slaves
• Device can be detected by fieldbus scan
Pre-operational
• The fieldbus is active.
• SDO communication (mailbox communication) is possible.
• No PDO communication
Safe-operational
• SDO communication (mailbox communication) is possible.
• PDO communication:
• The input data in the process image are updated.
• The output data from the process image are not transferred to the slaves.
Operational
Normal operation
• SDO communication
• PDO communication
• Fieldbus synchronisation has been successful (if used)
Note!
• A fieldbus scan is possible in any EtherCAT state.
Determining the physical EtherCAT configuration (fieldbus scan)
• The SDO communication via the EtherCAT bus is only possible if at least the "Pre-
Operational" state has been reached.
• Only in the transitional phases between states can bus nodes be in different states.