Triton BathyPro User Manual
Page 96
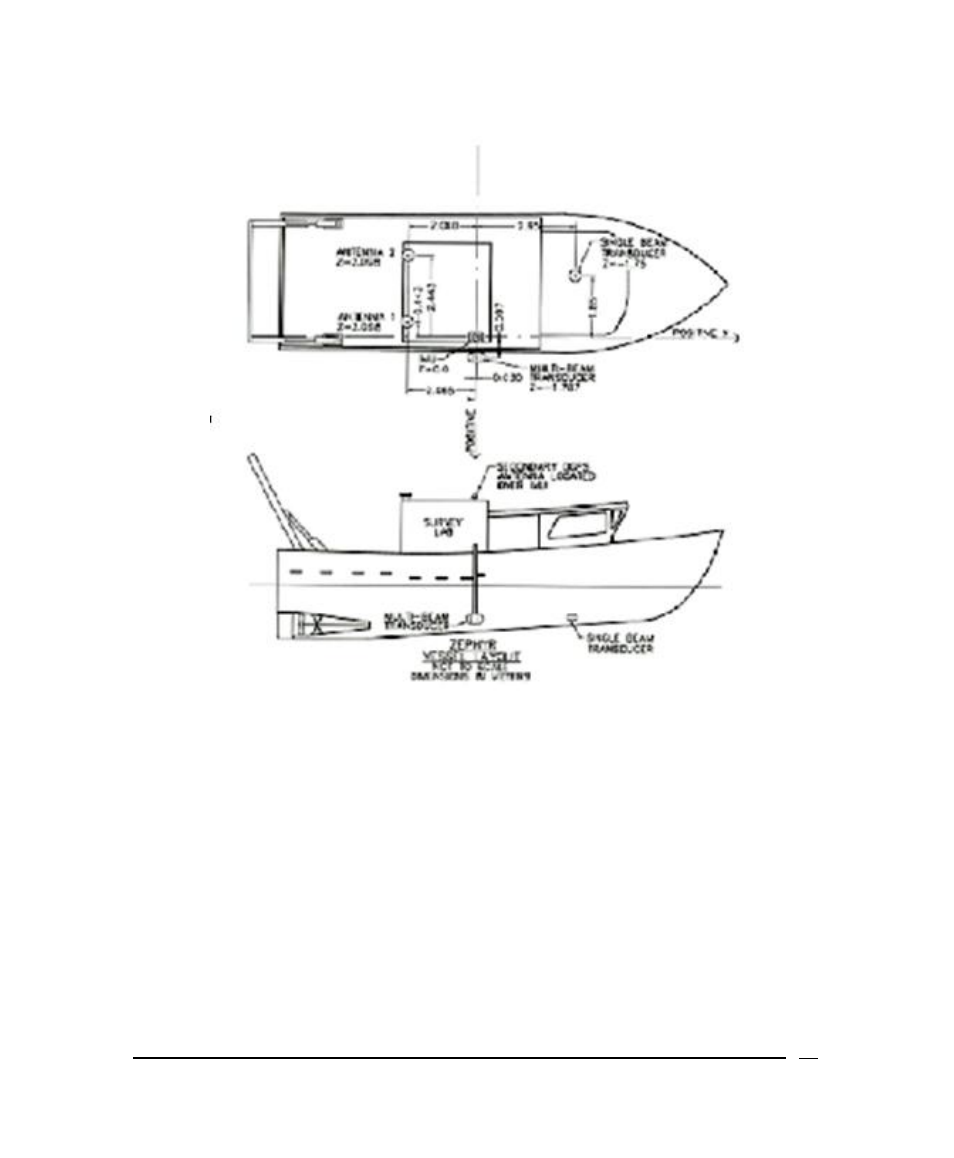
Figure 52. Typical offsets for navigation receptors on a vessel
Prior to system calibration, all sensors will need to be accurately measured from
a reference point (Figure 52). In theory, the reference point can be anywhere on
the vessel, but usually it is defined at the sonar head. Using the sonar head as
the center of a coordinate system, measure all offsets relative to the head. Use
the water line as a 0 point in the Z plane, with positive values below the
waterline. The bow-aft direction is the Y plane, with positive values towards the
bow. The port-starboard direction is the X plane, with positive values towards the
starboard side. Offsets can be set in the Isis Sonar set-up menu, or can be
applied during processing in BathyPro. Additionally, if a change to a setting is
June 2004
BathyPro User’s Manual
96