Bathymetry processing – Triton BathyPro User Manual
Page 61
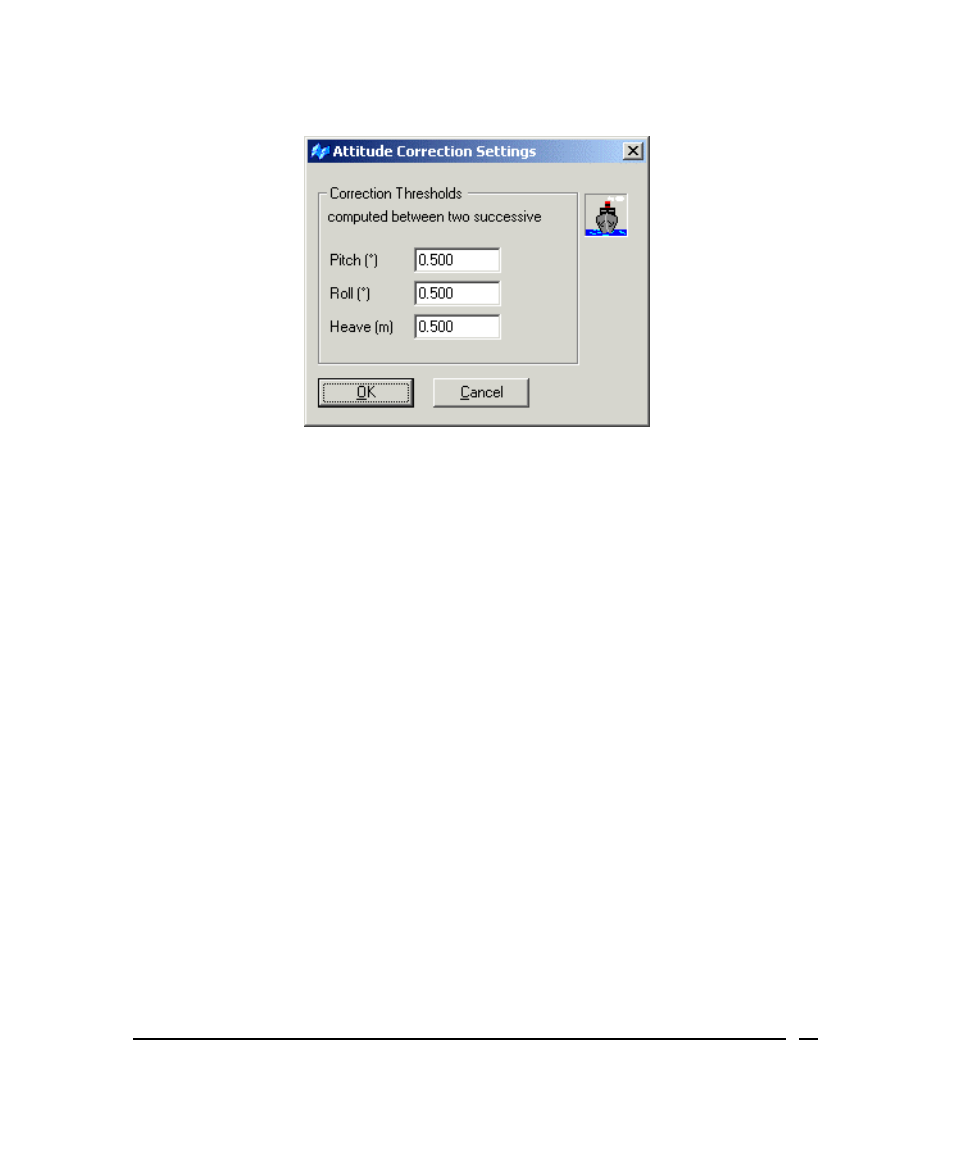
Figure 27. Attitude Correction Settings dialog box
In order to make useful entries here, the user needs to know something
about the conditions that existed at the time the data were acquired. Factors
such as a small vessel operating in rough weather, or a motion sensor with
a slow update rate, might cause the default values to be too small. However,
in the majority of cases the default values will be correct. The limits set in
Pitch, Roll and Heave represent the largest change, from one update to the
next, that the program will accept. Since most motion sensors already
process their outputs, the routine is simply a method of removing “spikes”
caused by transmission problems.
Bathymetry Processing
Clicking the Settings button to this parameter leads to the Bathymetry
Correction Settings dialog box (Figure 28). As the figure shows, you can
specify changes to:
• Suppress Beam using Beam Quality — All beams flagged as bad quality
by the sonar will be ignored by BathyPro. In addition, you can choose to
ignore (suppress) beams flagged as POOR Quality or LOW Quality by
putting a check mark in the boxes next to these parameters. (If you leave
either or both of the boxes unchecked, you are choosing not to suppress
these marginal quality beams, so they will be included with your BathyPro
processed data.)
June 2004
BathyPro User’s Manual
61