5 pi-5# ext. process pid ctrl – GE Industrial Solutions AF-650 GP General Purpose Drive Programming Guide User Manual
Page 138
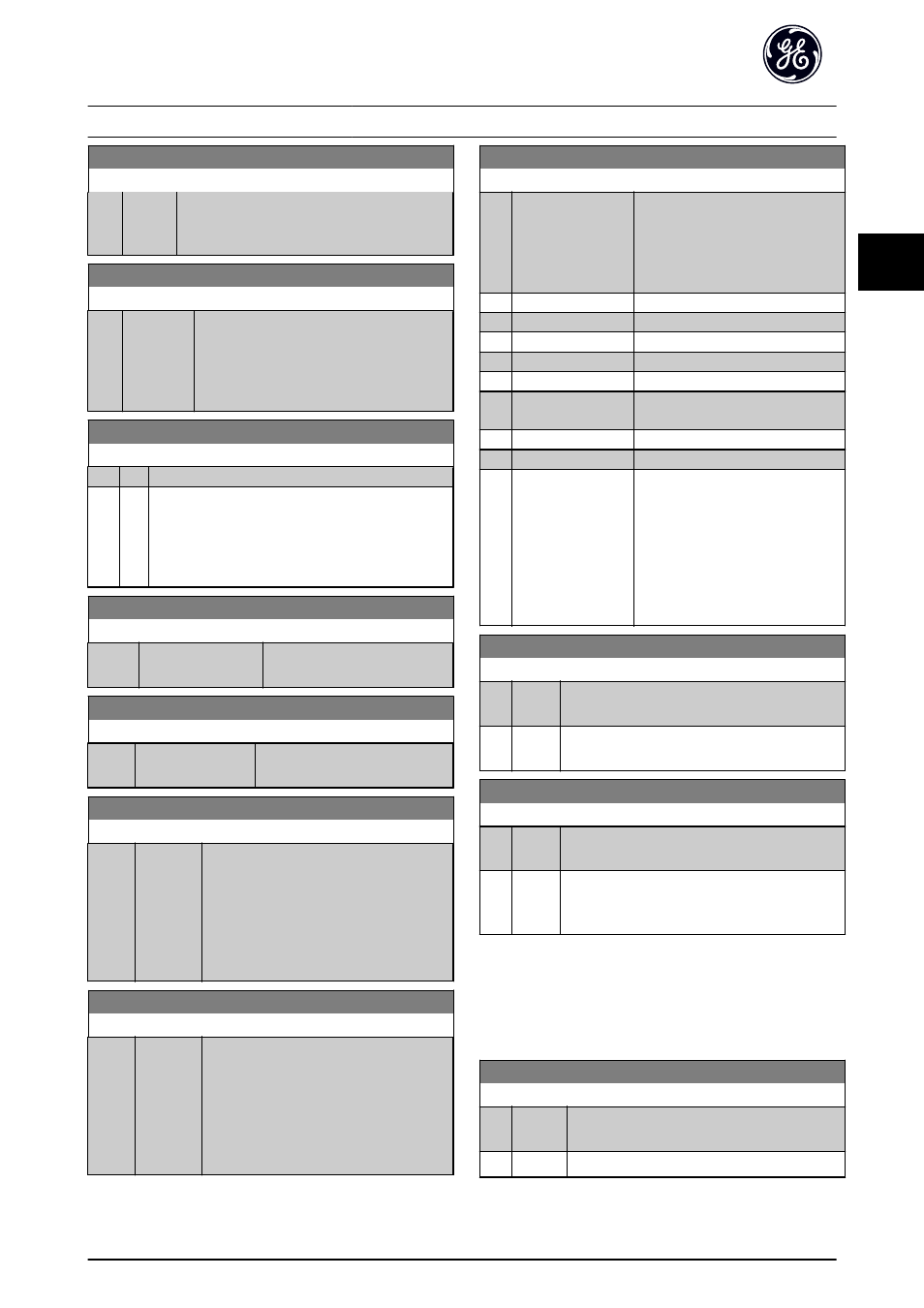
PI-38 Process PID Feed Forward Factor
Range:
Function:
PI-38 Process PID Feed Forward Factor is active
when H-40 Configuration Mode is set to [3]
Process.
PI-39 On Reference Bandwidth
Range:
Function:
5 %
*
[0 - 200
%]
Enter the On Reference bandwidth. When the
PID Control Error (the difference between the
reference and the feedback) is less than the
set value of this parameter the On Reference
status bit is high, i.e. =1.
PI-40 Process PID I-part Reset
Option:
Function:
[0]
*
No
[1]
Yes Select [1] Yes to reset the I-part of the process PID
controller. The selection will automatically revert to [0]
No. Resetting the I-part makes it possible to start from
a welldefined point after changing something in the
process, e.g. changing a textile roll.
PI-41 Process PID Output Neg. Clamp
Range:
Function:
-100 %
*
[-100 - par. PI-42 %] Enter a negative limit for the
process PID controller output.
PI-42 Process PID Output Pos. Clamp
Range:
Function:
100 %
*
[par. PI-41 - 100 %] Enter a positive limit for the
process PID controller output.
PI-43 Process PID Gain Scale at Min. Ref.
Range:
Function:
100 %
*
[0 - 100
%]
Enter a scaling percentage to apply to the
process PID output when operating at the
minimum reference. The scaling percentage
will be adjusted linearly between the scale
at min. ref. (PI-43 Process PID Gain Scale at
Min. Ref.) and the scale at max. ref.
(PI-44 Process PID Gain Scale at Max. Ref.).
PI-44 Process PID Gain Scale at Max. Ref.
Range:
Function:
100 %
*
[0 - 100
%]
Enter a scaling percentage to apply to the
process PID output when operating at the
maximum reference. The scaling percentage
will be adjusted linearly between the scale
at min. ref. (PI-43 Process PID Gain Scale at
Min. Ref.) and the scale at max. ref.
(PI-44 Process PID Gain Scale at Max. Ref.).
PI-45 Process PID Feed Fwd Resource
Option:
Function:
[0]
*
No function
Select which drive input should be
used as the feed forward factor. The
FF factor is added directly to the
output of the PID controller. This
increases dynamic performance.
[1]
Analog Input 53
[2]
Analog Input 54
[7]
Frequency input 29
[8]
Frequency input 33
[11]
Local bus reference
[20]
Digital Potenti-
ometer
[21]
Analog input X30-11
[22]
Analog input X30-12
[32]
Bus PCD
Selects a bus reference configured by
O-02 Control Word Source. Change
O-42 PCD Write Configuration for the
bus used in order to make the feed-
forward available in B-48 PCD Feed
Forward. Use index 1 for feed-
forward [748] (and index 2 for
reference [1682]).
PI-46 Process PID Feed Fwd Normal/ Inv. Ctrl.
Option:
Function:
[0]
*
Normal Select [0] Normal to set the feed forward factor to
treat the FF resource as a positive value.
[1]
Inverse Select [1] Inverse to treat the FF resource as a
negative value.
PI-49 Process PID Output Normal/ Inv. Ctrl.
Option:
Function:
[0]
*
Normal Select [0] Normal to use the resulting output from
the process PID controller as is.
[1]
Inverse Select [1] Inverse to invert the resulting output
from the process PID controller. This operation is
performed after the feed forward factor is applied.
3.21.5 PI-5# Ext. Process PID Ctrl.
This parameter group is only used if H-40 Configuration
Mode is set to [7] Extended PID speed CL or [8] Extended PID
Speed OL.
PI-50 Process PID Extended PID
Option:
Function:
[0]
Disabled Disables the extended parts of the process PID
controller.
[1]
*
Enabled
Enables the extended parts of the PID controller.
Parameter Descriptions
AF-650 GP Programming Guide
DET-618C
137
3
3