Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors MECHATROLINK-III Communications Reference User Manual
Page 338
9 Appendix
9.1.3 MECHATROLINK-III Common Parameters
9-40
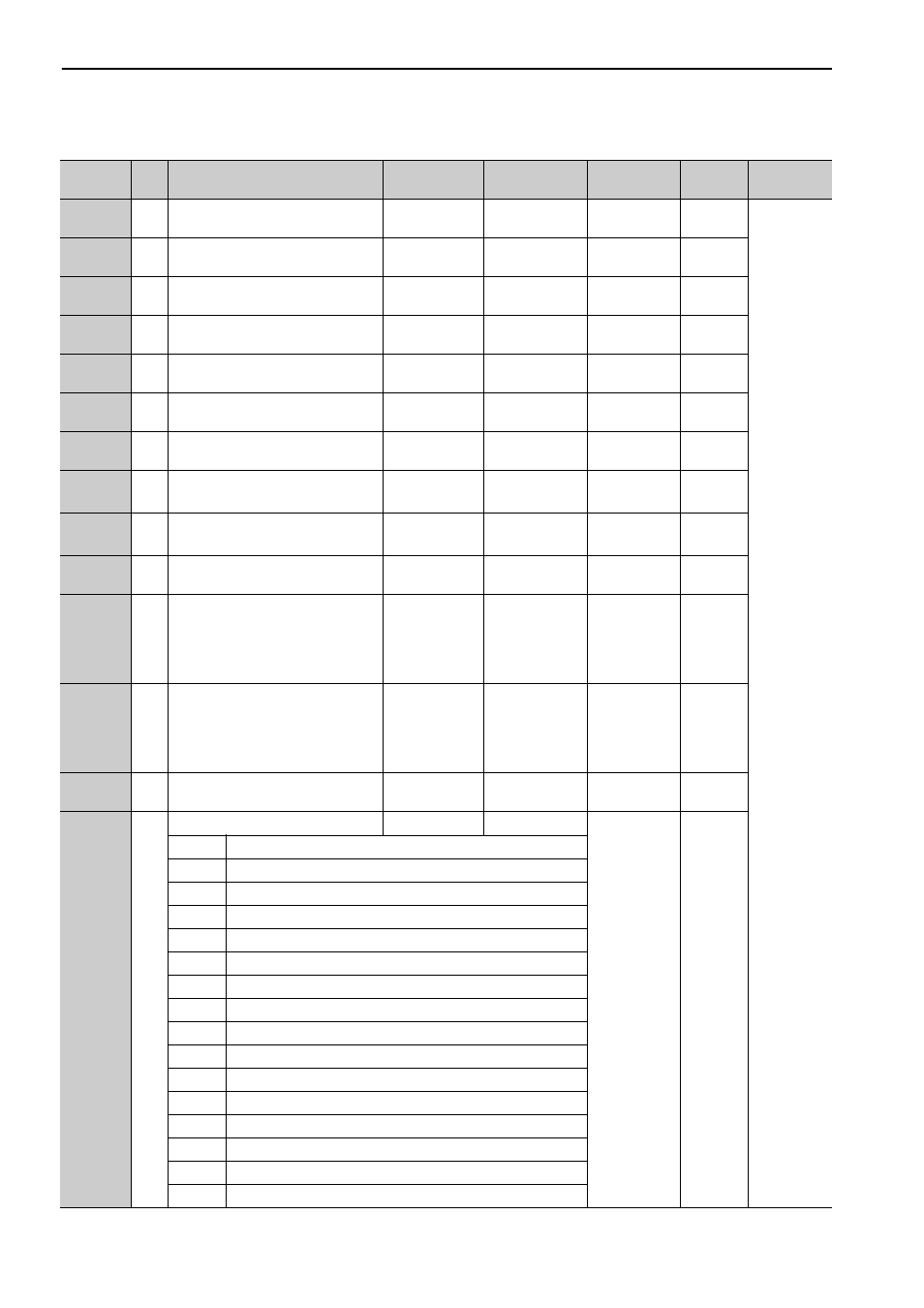
61
PnAC2
4
Speed Loop Gain
1000 to
2000000
0.001 Hz
[0.1 Hz]
40000
Immedi-
ately
Adjustment
Related
Parameters
62
PnAC4
4
Speed Loop Integral Time Constant
150 to 512000
μs
[0.01 ms]
20000
Immedi-
ately
63
PnAC6
4
Position Loop Gain
1000 to
2000000
0.001/s
[0.1/s]
40000
Immedi-
ately
64
PnAC8
4
Feedforward Compensation
0 to 100
1%
0
Immedi-
ately
65
PnACA
4
Position Loop Integral Time Con-
stant
0 to 5000000
μs
[0.1 ms]
0
Immedi-
ately
66
PnACC
4
Positioning Completed Width
0 to
1073741824
1 reference unit
7
Immedi-
ately
67
PnACE
4
NEAR Signal Width
1 to
1073741824
1 reference unit
1073741824
Immedi-
ately
81
PnB02
4
Exponential Function Accel/Decel
Time Constant
0 to 510000
μs
[0.1 ms]
0
Immedi-
ately
*6
82
PnB04
4
Movement Average Time
0 to 510000
μs
[0.1 ms]
0
Immedi-
ately
*6
83
PnB06
4
Final Travel Distance for External
Positioning
–1073741823
to 1073741823
1 reference unit
100
Immedi-
ately
84
PnB08
4
Homing Approach Speed
0 to
3FFFFFFFH
10
-3
mm/s
5000
Value
converted
reference/s
into 10
-3
mm/s
Immedi-
ately
85
PnB0A
4
Homing Creep Speed
0 to
3FFFFFFFH
10
-3
mm/s
500
Value
converted
reference/s
into 10
-3
mm/s
Immedi-
ately
86
PnB0C
4
Final Travel Distance for Homing
–1073741823
to 1073741823
1 reference unit
100
Immedi-
ately
87
PnB0E
4
Monitor Selection 1
0 to F
–
1
Immedi-
ately
0000H
APOS
0001H
CPOS
0002H
PERR
0003H
LPOS1
0004H
LPOS2
0005H
FSPD
0006H
CSPD
0007H
TRQ
0008H
ALARM
0009H
MPOS
000AH
Reserved (Undefined value)
000BH
Reserved (Undefined value)
000CH
CMN1 (Common monitor 1)
000DH
CMN2 (Common monitor 2)
000EH
OMN1 (Optional monitor 1)
000FH
OMN2 (Optional monitor 2)
∗6. Change the setting when the reference is stopped (DEN is set to 1), because the change will affect the output during
operation.
(cont’d)
Parameter
No.
Size
Name
Setting Range
Units
[Resolution]
Factory
Setting
When
Enabled
Classifica-
tion