Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors MECHATROLINK-III Communications Reference User Manual
Page 320
9 Appendix
9.1.2 Parameters
9-22
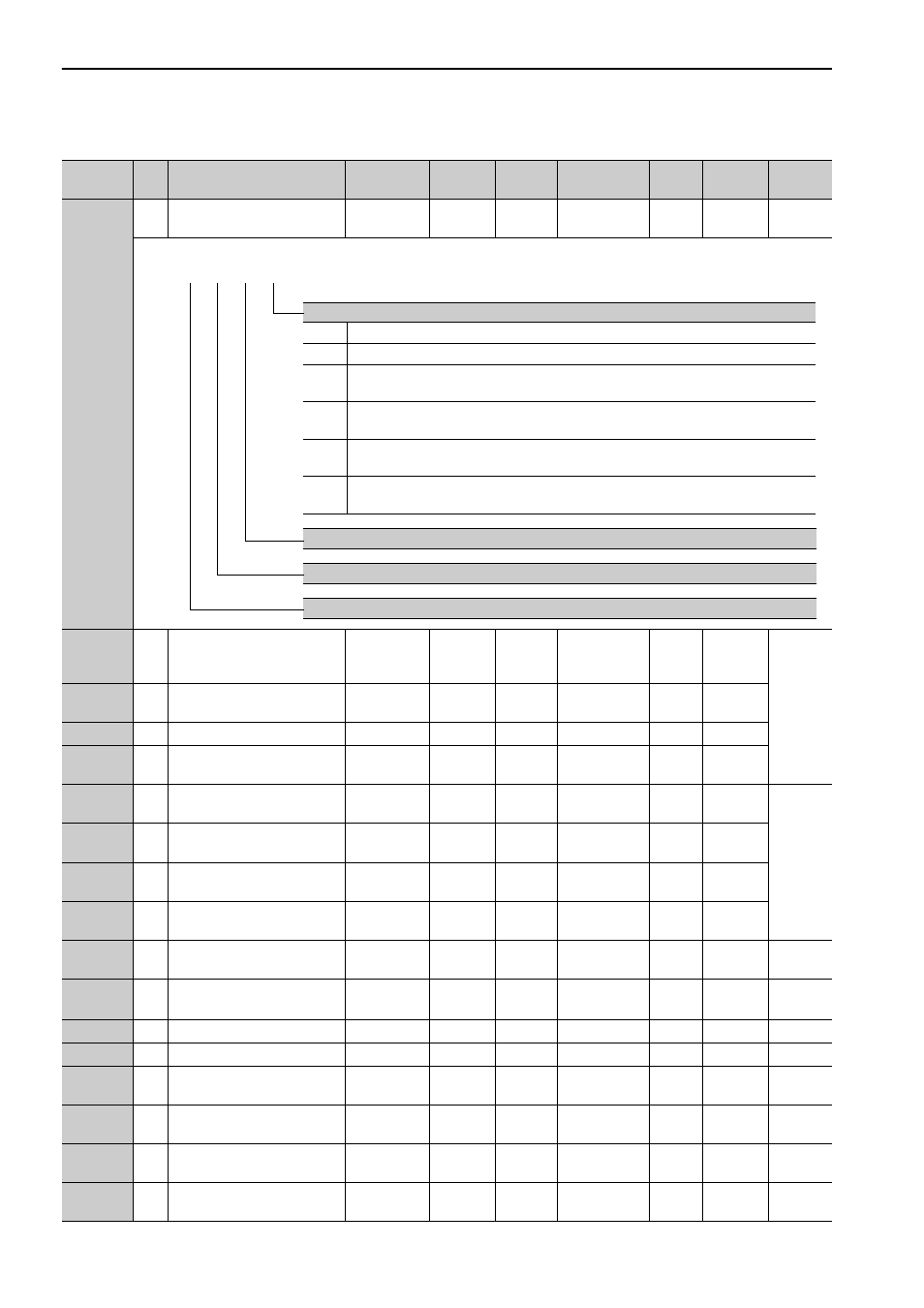
Pn530
2
Program JOG Operation
Related Switch
0000 to 0005
−
0000
Immediately
Setup
−
6.5
Pn531
4
Program JOG Movement
Distance
1 to
1073741824
1
reference
unit
32768
Immediately
Setup
−
6.5
Pn534
2
Program JOG Acceleration/
Deceleration Time
2 to 10000
1 ms
100
Immediately
Setup
−
Pn535
2
Program JOG Waiting Time
0 to 10000
1 ms
100
Immediately
Setup
−
Pn536
2
Number of Times of Program
JOG Movement
0 to 1000
1 time
1
Immediately
Setup
−
Pn550
2
Analog Monitor 1 Offset
Voltage
-10000 to
10000
0.1 V
0
Immediately
Setup
−
5.1.3
Pn551
2
Analog Monitor 2 Offset
Voltage
-10000 to
10000
0.1 V
0
Immediately
Setup
−
Pn552
2
Analog Monitor
Magnification (
×1)
-10000 to
10000
×0.01
100
Immediately
Setup
−
Pn553
2
Analog Monitor
Magnification (
×2)
-10000 to
10000
×0.01
100
Immediately
Setup
−
Pn560
2
Remained Vibration
Detection Width
1 to 3000
0.1%
400
Immediately
Setup
−
5.7.1
Pn561
2
Overshoot Detection Level
0 to 100
1%
100
Immediately
Setup
−
5.3.1
5.4.1
Pn580
2
Zero Clamp Level
0 to 10000
1 mm/s
10
Immediately
Setup
−
–
Pn581
2
Zero Speed Level
1 to 10000
1 mm/s
20
Immediately
Setup
−
4.8.3
Pn582
2
Speed Coincidence Signal
Output Width
0 to 100
1 mm/s
10
Immediately
Setup
−
4.8.5
Pn583
2
Brake Reference Output
Speed Level
0 to 10000
1 mm/s
10
Immediately
Setup
−
4.3.4
Pn584
2
Speed Limit Level at Servo
ON
0 to 10000
1 mm/s
10000
Immediately
Setup
−
5.1.4
Pn585
2
Program JOG Movement
Speed
1 to 10000
1 mm/s
50
Immediately
Setup
−
6.5
(cont’d)
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classi-
fication
Profile
Reference
Section
Program JOG Operation Switch
0
(Waiting time Pn535 → Forward movement Pn531) × Number of movements Pn536
1
(Waiting time Pn535 → Reverse movement Pn531) × Number of movements Pn536
2
(Waiting time Pn535 → Forward movement Pn531) × Number of movements Pn536
(Waiting time Pn535 → Reverse movement Pn531) × Number of movements Pn536
3
(Waiting time Pn535 → Reverse movement Pn531) × Number of movements Pn536
(Waiting time Pn535 → Forward movement Pn531) × Number of movements Pn536
4
(Waiting time Pn535 → Forward movement Pn531 → Waiting time Pn535 →
Reverse movement Pn531) × Number of movements Pn536
5
(Waiting time Pn535 → Reverse movement Pn531 → Waiting time Pn535 →
Forward movement Pn531) × Number of movements Pn536
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
4th 3rd 2nd 1st
digit digit digit digit
n.