2 absolute data reception sequence, 1) outline of absolute data, 2) absolute data reception sequence – Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors MECHATROLINK-III Communications Reference User Manual
Page 127: 48 and 65, Phase-c output specifications
4.7 Absolute Linear Scales
4-39
4
Op
er
at
io
n
4.7.2 Absolute Data Reception Sequence
The sequence in which the SERVOPACK receives outputs from the absolute linear scale and transmits them to
host controller is shown below.
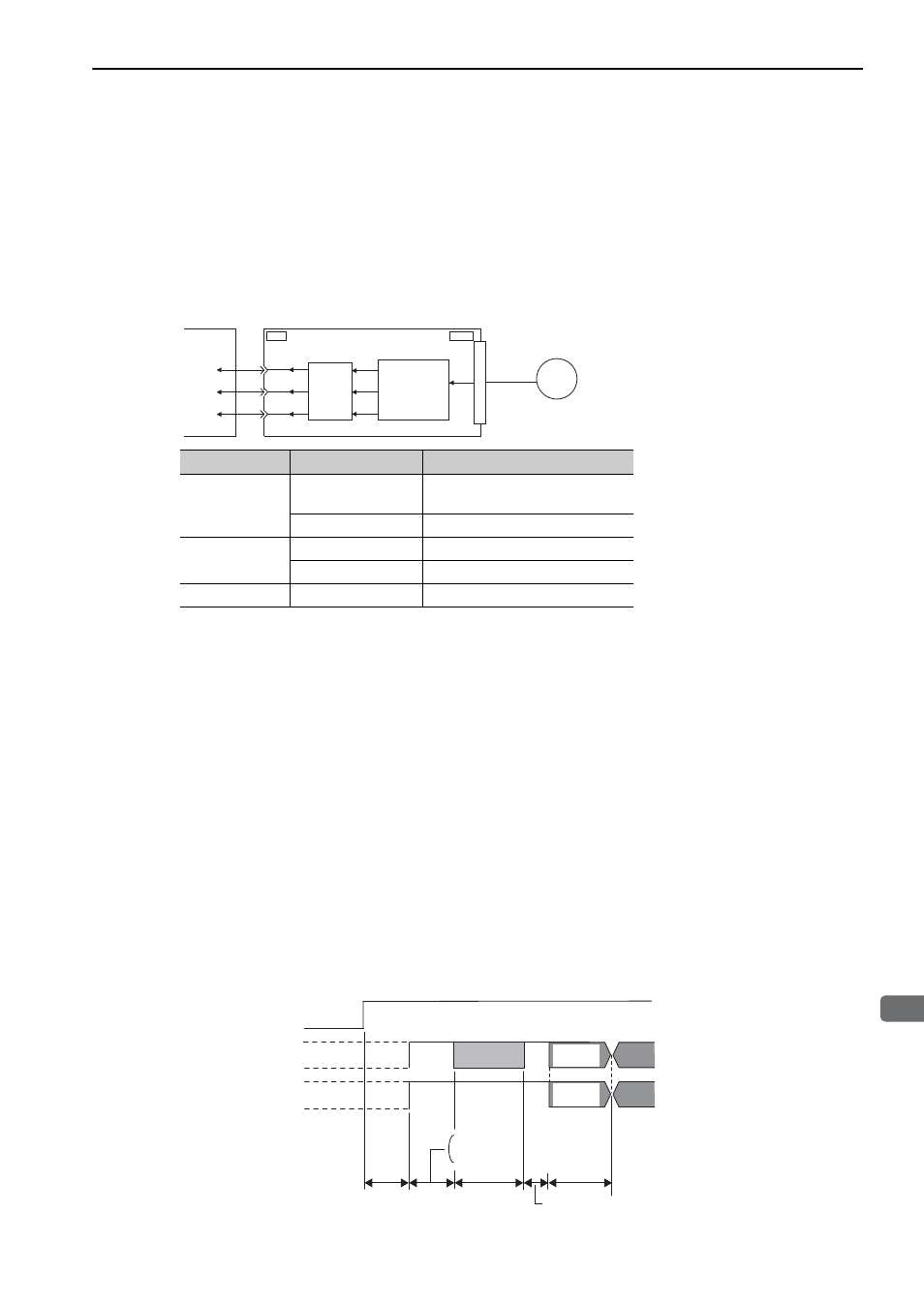
(1) Outline of Absolute Data
The serial data, pulses, etc., of the absolute linear scale that are output from the SERVOPACK are output from
the PAO, PBO, and PCO signals as shown below.
Phase-C Output Specifications
The pulse width of phase C (origin pulse) changes depending on the encoder output resolution (Pn281),
becoming the same width as phase A.
The output timing is one of the following.
• Synchronized with the rising edge of phase A
• Synchronized with the falling edge of phase A
• Synchronized with the rising edge of phase B
• Synchronized with the falling edge of phase B
Note: When host controller receives the data of absolute linear scale, do not perform counter reset using the output of PCO
signal.
(2) Absolute Data Reception Sequence
1. Send the Turn Sensor ON (SENS_ON) command from the host controller.
2. After 100 ms, the system is set to serial data reception standby and the incremental pulse up/down counter
is cleared to zero.
3. Eight characters of serial data is received.
4. The system enters a normal incremental operation state about 400 ms after the last serial data is received.
Note: The output pulses are phase-B advanced if the servomotor is moving forward regardless of the setting in Pn000.0.
Signal Name
Status
Contents
PAO
At initialization
Serial data
Initial incremental pulses
Normal Operations
Incremental pulses
PBO
At initialization
Initial incremental pulses
Normal Operations
Incremental pulses
PCO
Always
Origin pulses
ENC
CN1
PAO
PBO
PCO
CN2
Serial
data
Serial data→
pulse conversion
Host
controller
SERVOPACK
Dividing
circuit
(Pn281)
48 and 65
PAO
PBO
SENS_ON
(Turn Sensor ON)
Incremental pulses
Incremental pulses
Undefined
Undefined
(Phase A) (Phase A)
(Phase B) (Phase B)
Serial data
400 ms max.
50 ms
1 to 3 ms
Approx. 15 ms
90 ms typ.
60 ms min.
Initial
incremental
pulses
Initial
incremental
pulses
65