Linear, Using the force reference [factory setting, Using the speed reference – Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors MECHATROLINK-III Communications Reference User Manual
Page 212: Using acceleration, Using the position error
5 Adjustments
5.9.2 Mode Switch (P/PI Switching)
5-62
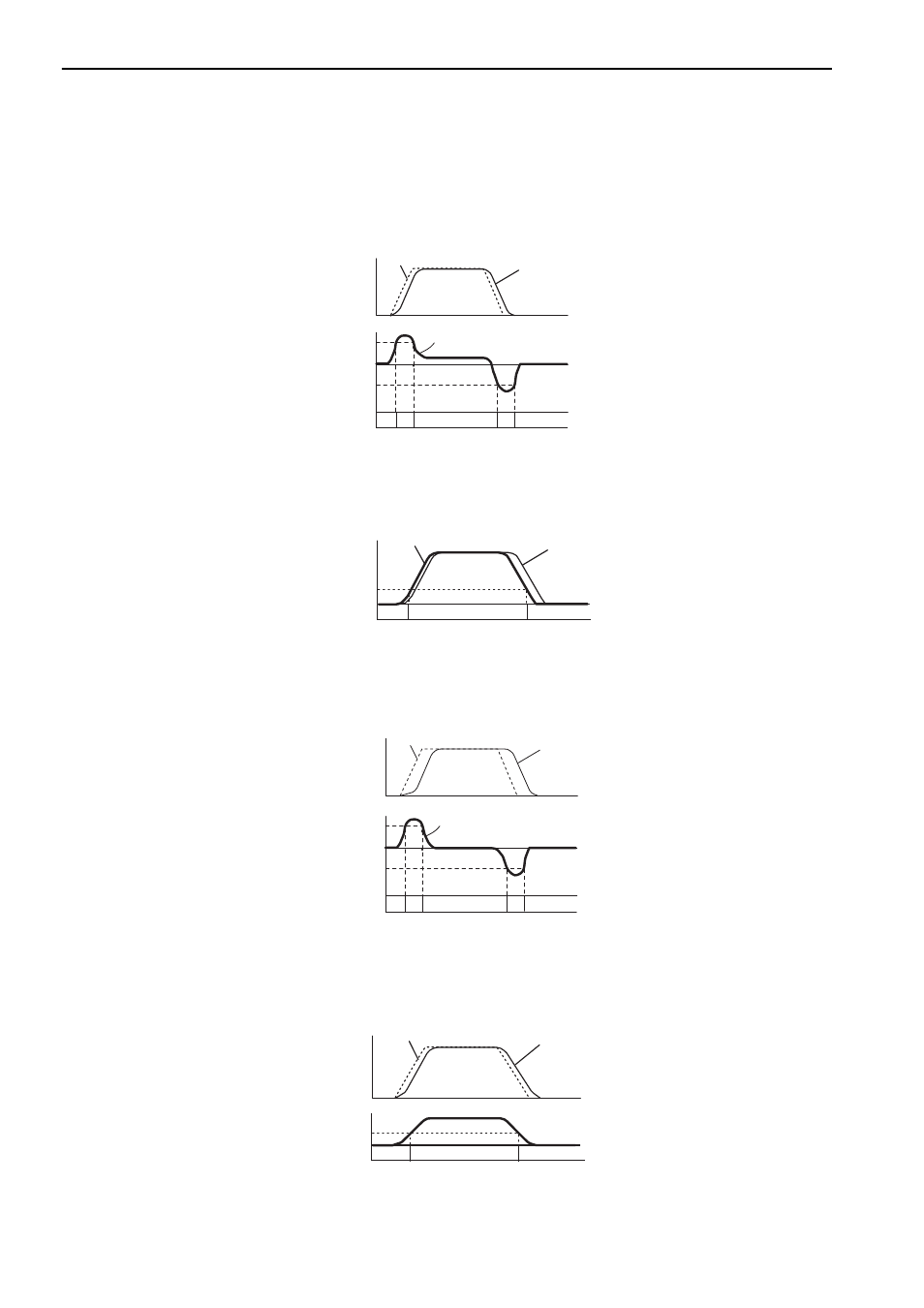
(2) Operating Examples for Different Switching Conditions
Using the Force Reference [Factory Setting]
With this setting, the speed loop is switched to P control when the value of force reference input exceeds the
force set in Pn10C. The factory setting for the force reference detection point is 200% of the rated force.
Using the Speed Reference
With this setting, the speed loop is switched to P control when the value of speed reference input exceeds the
speed set in Pn181.
Using Acceleration
With this setting, the speed loop is switched to P control when the speed reference exceeds the acceleration set
in Pn182.
Using the Position Error
With this setting, the speed loop is switched to P control when the position error exceeds the value set in
Pn10F.
This setting is effective with position control only.
Motor speed
Speed reference
Speed
+Pn10C
Force
Reference
- Pn10C
Force reference
PI Control
PI Control
0
PI
P
P
Time
Linear
Speed reference
Speed
Motor speed
Time
P Control
PI Control
Pn181
PI
Linear
Motor
speed
Speed reference
Speed
Motor acceleration
+Pn182
Acceleration
- Pn182
PI Control
PI Control
0
PI
P
P
Time
Linear
Position
error
Speed reference
Speed
Motor speed
Time
P Control
PI Control
Pn10F
PI