2 parameters – Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors MECHATROLINK-III Communications Reference User Manual
Page 301
9.1 List of Parameters
9-3
9
Ap
pend
ix
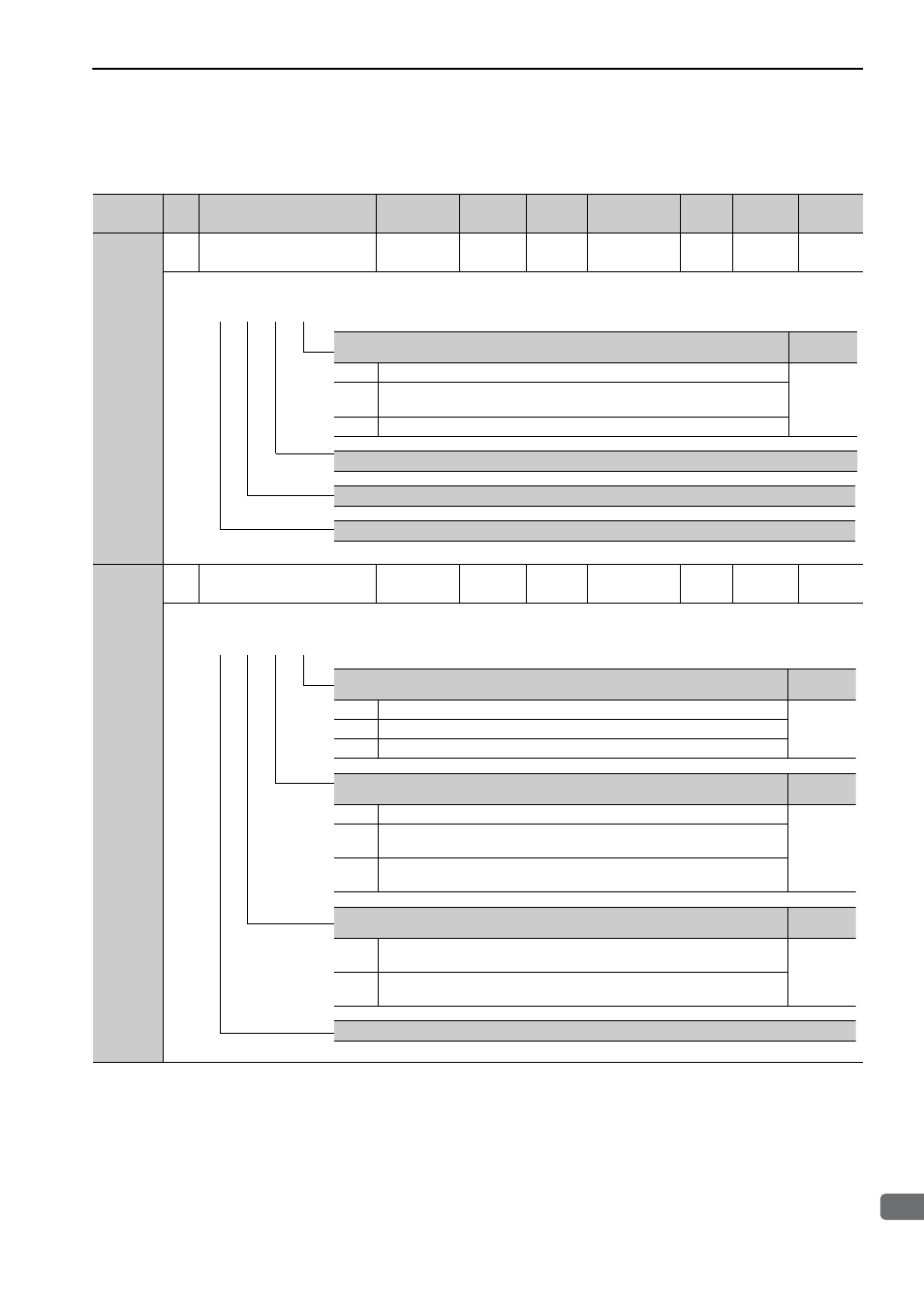
9.1.2 Parameters
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classi-
fication
Profile
Reference
Section
Pn000
2
Basic Function Select Switch
0
0000 to
00B3
−
0000
After restart
Setup
−
−
Pn001
2
Application Function Select
Switch 1
0000 to 1122
−
0000
After restart
Setup
−
−
Direction Selection
Reference
Section
0
Sets the linear scale counting up (phase-A lead) direction as forward direction.
4.3.1
1
Sets the linear scale counting down (phase-B lead) direction as forward direction
(Reverse Movement Mode)
2 to 3
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
4th 3rd 2nd 1st
digit digit digit digit
n.
Servomotor power OFF or Alarm Gr.1 Stop Mode
Reference
Section
0
Stops the servomotor by applying DB (dynamic brake).
4.3.5
1
Stops the servomotor by applying DB and then releases DB.
2
Makes the servomotor coast to a stop state without using the DB.
Overtravel (OT) Stop Mode
Reference
Section
0
Stops in accordance with the setting of Pn001.0.
4.3.2
1
Sets the force of Pn406 to the maximum value, decelerates the servomotor to a stop,
and then sets it to servolock state.
2
Sets the force of Pn406 to the maximum value, decelerates the servomotor to a stop,
and then sets it to coasting state.
AC/DC Power Input Selection
Reference
Section
0
Applicable to AC power input: Input AC power supply through L1, L2, and L3
terminals.
3.1.4
1
Applicable to DC power input: Input DC power supply between B1/ + and
−2, or input
DC power supply between B1/ + and
−.
Reserved (Do not change.)
4th 3rd 2nd 1st
digit digit digit digit
n.