Disable soft overtravel limit, Ladder code example, Disable soft overtravel limit ladder code example – Rockwell Automation MPMA Integrated Multi-Axis Linear Stages User Manual
Page 119
Rockwell Automation Publication MPMA-UM001B-EN-P - November 2010
119
Home to Torque-level Example
Appendix D
Disable Soft Overtravel
Limit
If the application requires the use of soft-overtravel limits (Limits tab) to
safeguard the system mechanics, disable the Soft Travel Limits for the axis to
home. The Soft Travel Limits are disabled to prevent a fault from occurring
during the homing operation, but re-enable them after homing completes.
Ladder Code Example
This example shows how to adjust the peak torque limit and disable the soft-
overtravel limit checking when homing to a torque limit. The code uses a state
model methodology in which each rung of code needs to complete successfully
before moving to the next rung.
Rung 11 of the ladder code checks to make sure that the axis position, after
homing, is within the Soft Travel Limits before re-enabling soft-overtravel limit
checking. In this example, a 1.15 cm Offset move is configured in the Homing tab
and that is the final home position. The 0.5 cm is within the Soft Travel Limits
set on the Limits tab.
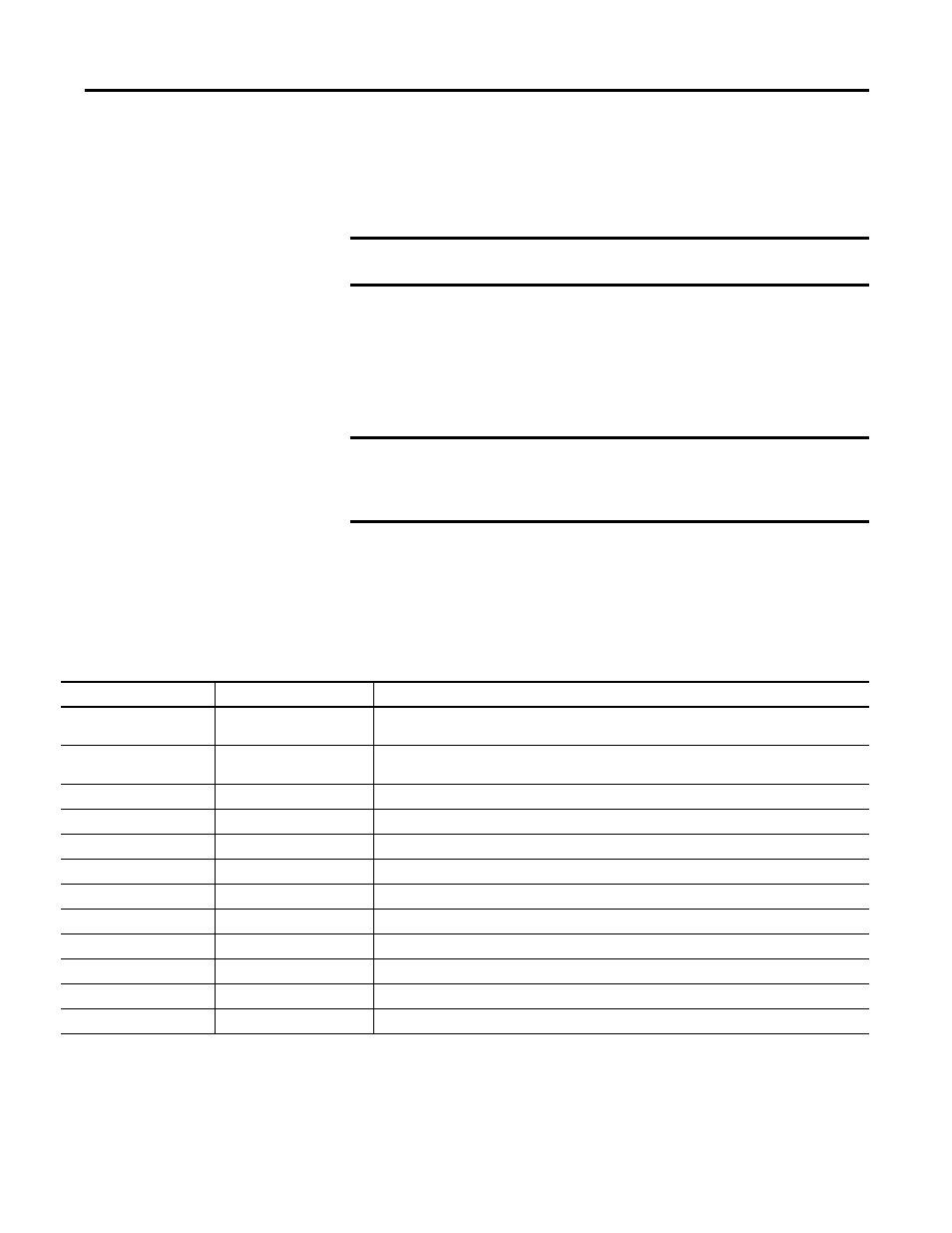
Table 53 - Tags Used
IMPORTANT
Those responsible for the application must determine when it is
safe and appropriate to disable soft-overtravel checking.
IMPORTANT
Because the home to torque-level sequence relies on the
mechanical end of travel for operation, Uni-directional homing is
not possible. You must choose between Forward Bi-directional or
Reverse Bi-directional.
Tag Name
Data Type
Description
Saved_FaultConfig
DINT
Storage location for FaultConfigurationBits (motion attributes)
Bit 0 = soft-overtravel limit checking
Clear_SoftOT_Mask
DINT Set
to
-2.
This masks the off soft-overtravel enable bit without changing the other configuration bits.
Temp_FaultConfig
DINT
Temporary hold word for FaultConfigurableBits
SoftOT_Disabled
BOOL
Soft-overtravel checking disabled status bit
Saved_TQLim_Bipolar REAL
Storage
location for Peak Torque (TorqueLimitBipolar)
HomeTQ_Level
REAL
Home Torque Level from the Home tab in Axis Properties
Temp_TQLim_Bipolar
REAL
Temporary Peak Torque for Homing (10% higher than Home Torque Limit)
Axis_01_MI.MAH
MOTION_INSTRUCTION
Control for MAH instruction (using a UDT)
Positive_Overtravel REAL
Max
Positive Soft-overtravel value
Negative_Overtravel
REAL
Max Negative Soft-overtravel value
Saved_PosErrorTol
REAL
Storage location for Actual Position Error value
Temp_PosErrorTol
REAL
Temporary Position Error value for Homing