About home to torque-level homing – Rockwell Automation MPMA Integrated Multi-Axis Linear Stages User Manual
Page 116
116
Rockwell Automation Publication MPMA-UM001B-EN-P - November 2010
Appendix D Home to Torque-level Example
About Home to Torque-level
Homing
Home to torque-level homing is a process that references a known position by
monitoring torque while driving an axis into a mechanical hard-stop. Once the
actual torque level reaches or exceeds a specified torque level for a set time of 500
ms, a status flag is set in the controller.
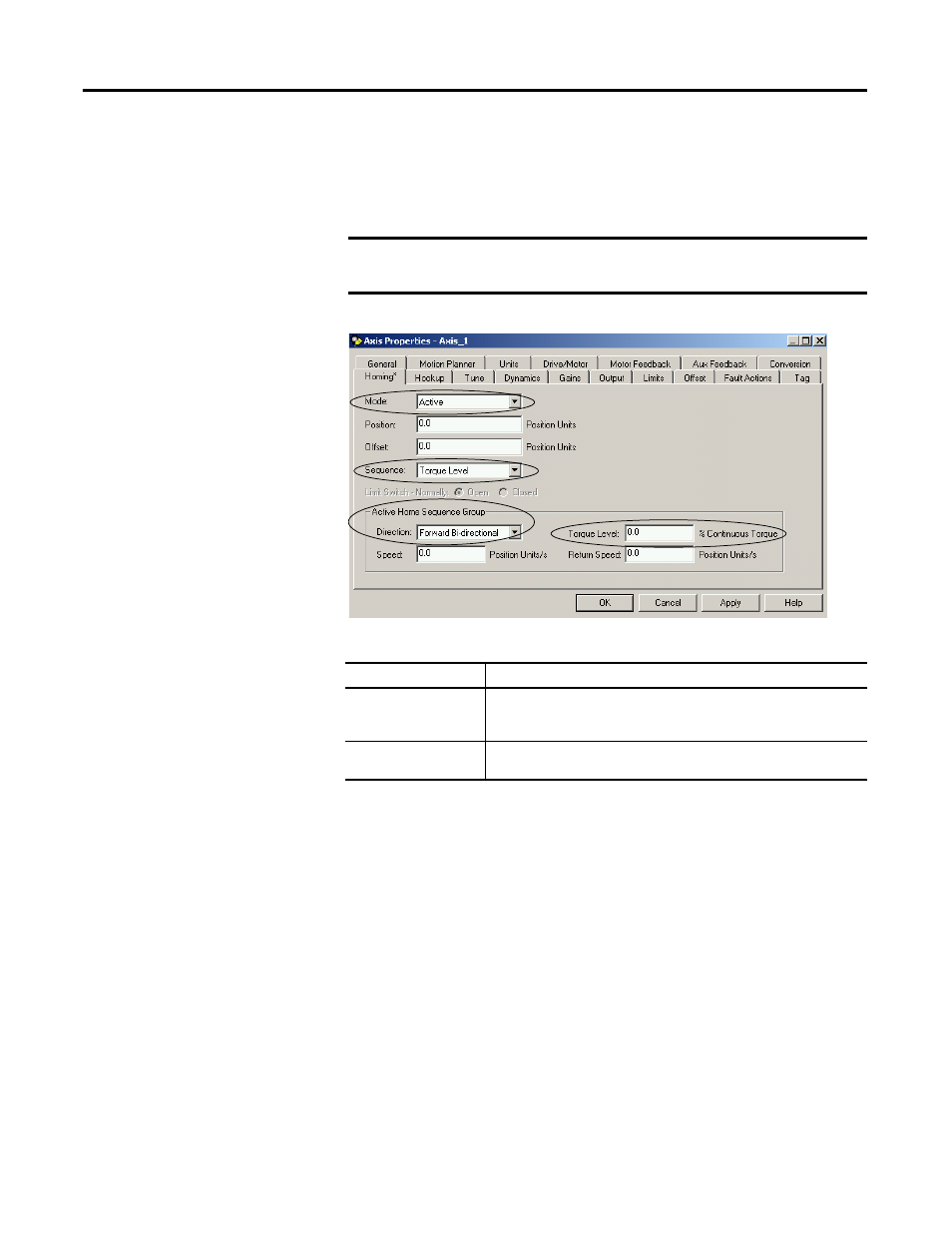
Figure 18 - Axis Properties - Homing Tab
Table 51 - Torque-level Homing
When either the Torque Level or Torque Level - Marker homing option is
selected on the Homing tab, the Torque Level field is activated in the Active
Home Sequence Group. The units for this field are a percentage of the
continuous torque of the motor (% Continuous Torque) limited by the drive-
rated current/motor-rated current ratio. This number is interpreted in the drive
as an absolute value and the range is 0 through the TorqueLimitPositive value.
Forward Bi-directional and Reverse Bi-directional are the only options for the
Direction field when Torque Level or Torque Level - Marker homing sequence is
selected. Uni-directional homing is not possible, because the Home to Torque-
level sequence relies on a mechanical hard-stop.
IMPORTANT
Because the process of home to torque-level requires axis motion,
the axis homing mode must be configured as Active.
Sequence Type
Description
Torque Level
Sets the Home Position after the output torque reaches the Torque Level
value, reverses direction, and moves until the Homing Torque Above
Threshold bit is low and the status bit sets.
Torque Level - Marker
Sets the Home Position after the output torque reaches the Torque Level
value, reverses direction, and encounters an encoder marker.