Rockwell Automation 284D ArmorStart - Safety Version - User Manual User Manual
Page 126
4-56
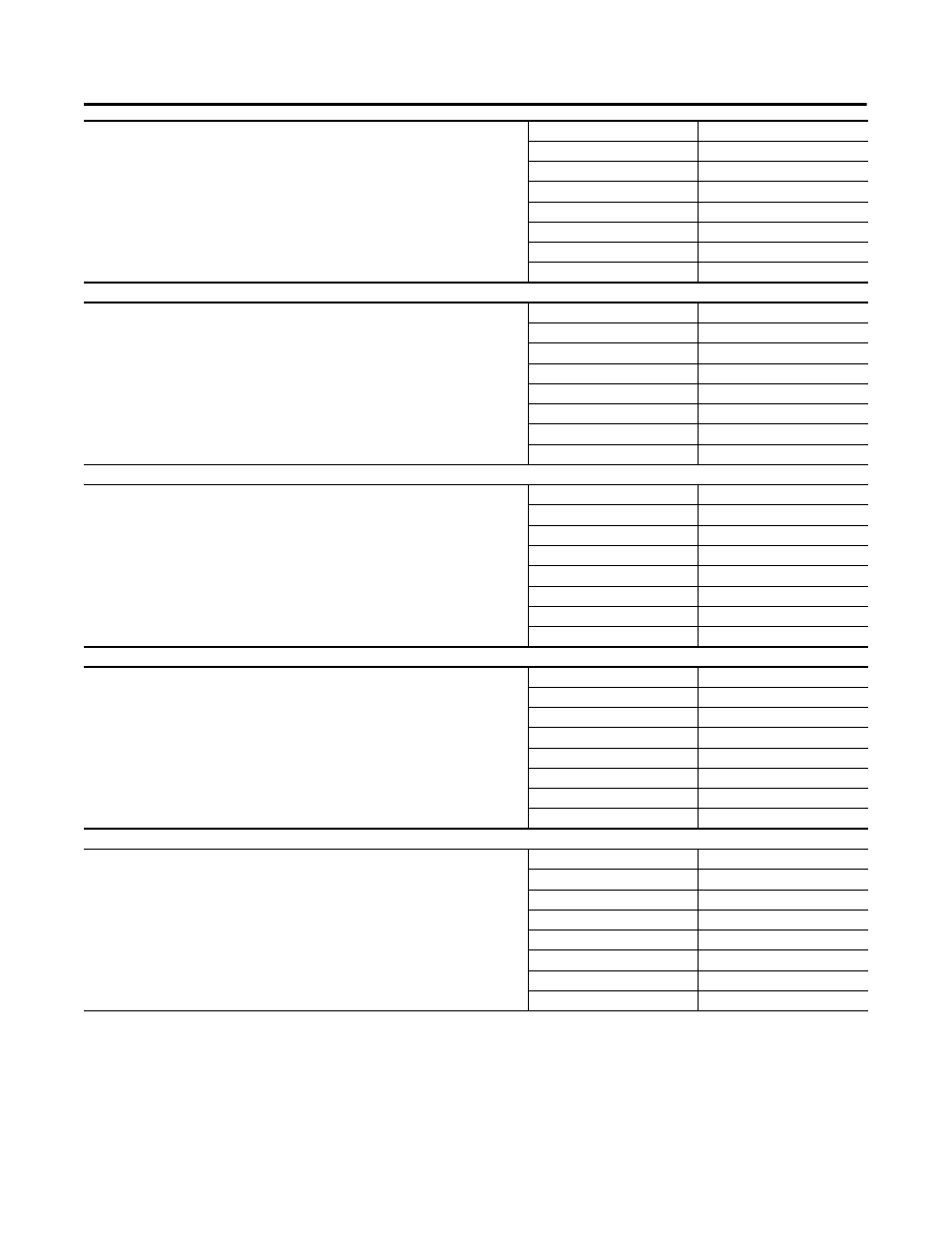
Bulletin 284 Programmable Parameters for Sensorless Vector Controllers
PID Feedback Sel
Valid PID Feedback Sel command for the Bulletin 284 ArmorStart is the following;
2 = Comm Port
Parameter Number
233
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Program Group
Units
—
Minimum Value
0
Maximum Value
2
Default Value
0
PID Prop Gain
Sets the value for the PID proportional component when the PID mode is enabled by
Parameter 232 (PID Ref Sel).
Parameter Number
234
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Program Group
Units
0.01
Minimum Value
0.00
Maximum Value
99.99
Default Value
0.01
PID Integ Time
Sets the value for the PID integral component when the PID mode is enabled by
Parameter 232 (PID Ref Sel).
Parameter Number
235
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Program Group
Units
0.1 sec
Minimum Value
0.0 sec
Maximum Value
999.9 sec
Default Value
0.1 sec
PID Diff Rate
Sets the value for the PID differential component when the PID mode is enabled by
Parameter 232 (PID Rel Sel).
Parameter Number
236
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Program Group
Units
0.01 (1/sec)
Minimum Value
0.00 (1/sec)
Maximum Value
99.99 (1/sec)
Default Value
0.01 (1/sec)
PID Setpoint
Provides an internal fixed value for process setpoint when the PID mode is enabled
by Parameter 232 (PID Ref Sel).
Parameter Number
237
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Program Group
Units
0.1%
Minimum Value
0.0%
Maximum Value
10.0%
Default Value
0.0%