Rockwell Automation 284D ArmorStart - Safety Version - User Manual User Manual
Page 101
Bulletin 284 Programmable Parameters for Sensorless Vector Controllers
4-31
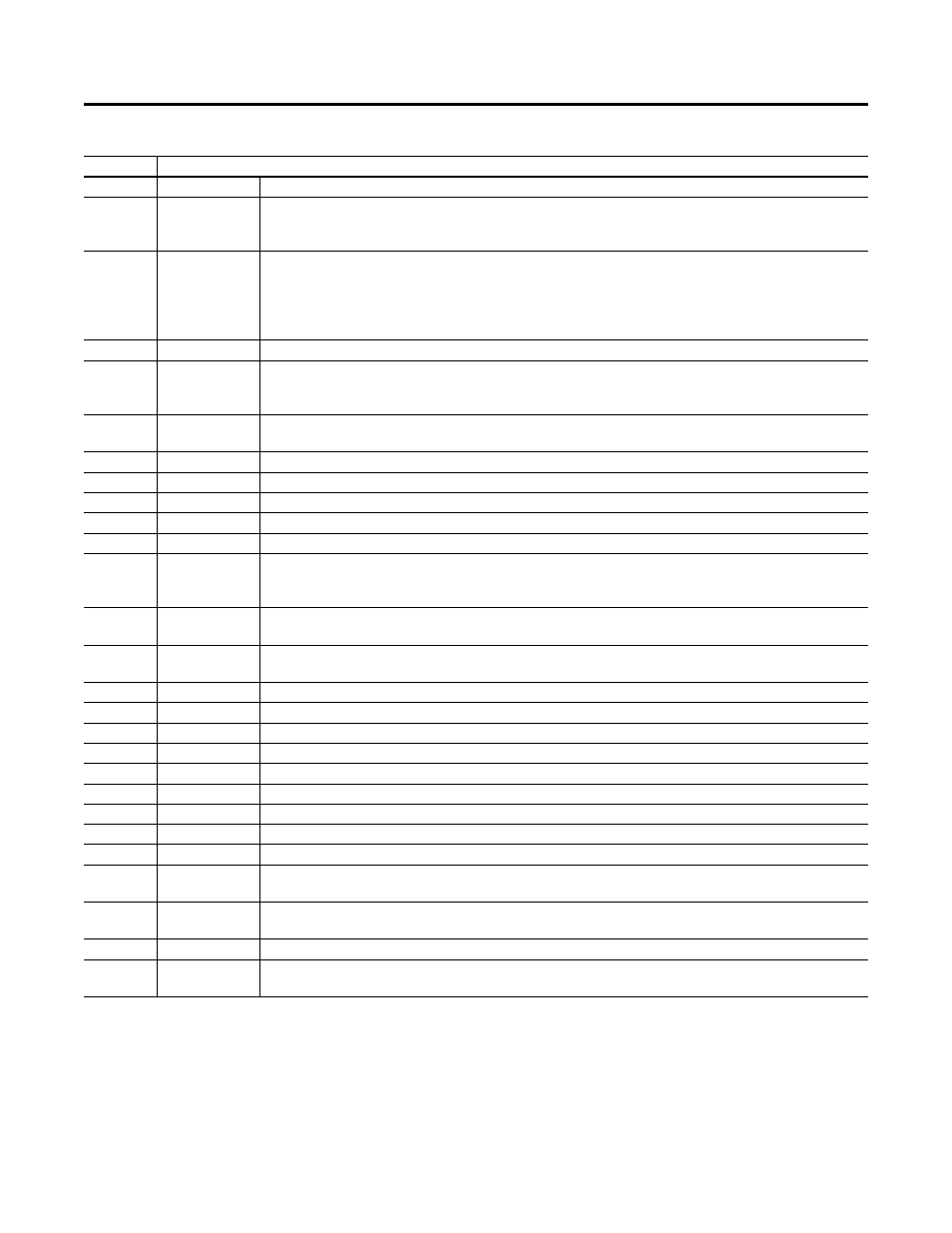
Table 4.2 Digital Inputs Options
Options
Description
0
Not Used
Terminal has no function but can be read over network communication via Parameter 114 (Dig In Status).
1
Acc & Dec2
• When active, Parameter 167 (Accel Time 2) and Parameter 168 (Decel Time 2) are used for all ramp rates
except Jog.
• Can only be tied to one input.
2
Jog
• When input is present, drive accelerates according to the value set in Parameter 179 (Jog Accel/Decel) and
ramps to the value set in Parameter 178 (Jog Frequency).
• When the input is removed, drive ramps to a stop according to the value set in Parameter 179 (Jog Accel/
Decel).
• A valid Start command will override this input.
3
Aux Fault
When enable, an F2 Auxiliary Input fault will occur when the input is removed.
4
Preset Freq
(Parameters 151
and 152 Default)
Refer to Parameters 170…173 and 174…177.
5
Local (Parameter
153 Default)
Option not valid for Bulletin 284 ArmorStart.
6
Comm Port
This option is the default setting.
7
Clear Fault
When active, clears active fault.
8
RampStop,CF
Causes drive to immediately ramp to stop regardless of how Parameter 137 (Stop Mode) is set.
9
CoastStop,CF
Causes drive to immediately ramp to stop regardless of how Parameter 137 (Stop Mode) is set.
10
DCInjStop,CF
Causes drive to immediately begin a DC Injection stop regardless of how Parameter 137 (Stop Mode) is set.
11
Jog Forward
(Parameter 154
Default)
Drive accelerates to Parameter 178 (Jog Frequency) according to Parameter 179 (Jog Accel/Decel) and ramps to
stop when input becomes inactive. A valid start will override this command.
12
Jog Reverse
Drive accelerates to Parameter 178 (Jog Frequency) according to Parameter 179 (Jog Accel/Decel) and ramps to
stop when input becomes inactive. A valid start will override this command.
13
10V In Ctrl
Option with Factory Installed option — A10 (0…10V Analog Input). Selects 0…10V or +/-10V as the frequency
reference. Start source is not changed.
14
20MA In Ctrl
Option not valid for Bulletin 284 ArmorStart.
15
PID Disable
Disabled PID function. Drive uses the next valid non-PID speed reference.
16
MOP Up
Increases the value of Parameter 169 (internal Freq) at a rate 2 Hz per second. Default of Parameter 169 is 60 Hz.
17
MOP Down
Decreases the value of Parameter 169 (internal Freq) at a rate 2 Hz per second. Default of Parameter 169 is 60 Hz.
18
Timer Start
Clears and starts the timer function. May be used to control the relay or opto outputs.
19
Counter In
Starts the counter function. May be used to control the relay or opto outputs.
20
Reset Timer
Clears the active timer.
21
Reset Countr
Clears the active counter.
22
Rset Tim&Cnt
Clear active timer and counter.
23
Logic In1
Logic Function input number 1. May be used to control the relay or opto outputs (see Parameters 155, 158, 161
options 11…14). May be used in conjunction with Step Logic Parameters 240…247 (Stp Logic X).
24
Logic In2
Logic Function input number 1. May be used to control the relay or opto outputs (see Parameters 155, 158, 161
options 11…14). May be used in conjunction with Step Logic Parameters 240…247 (Stp Logic X).
25
Current Lmt2
When active, Parameter 218 (Current Limit 2) determines the drive current limit level.
26
Anlg Invert
Inverts the scaling of analog input levels set in parameter 210 (Anlg In 0…10V LO) and parameter 211
(Anlg In 0…10 HI).